Hirdetés
-

PROHARDVER!
Arduino hardverrel és szoftverrel foglakozó téma. Minden mikrovezérlő ami arduinoval programozható, és minden arduino program, board, és hardverrel kapcsolatos kérdések helye.

Új hozzászólás Aktív témák
-
-

Janos250
őstag
Na, keverednek a dolgok!
Ha arduino alatt használod, más a WEB kezelése, de mennie kell. Én laborcuccok mért adatait küldöm mobiltelefonra, illetve telefonról vezérlem őket.
Prímán működnek, kényelmes. Nem bonyolult!
Használom a NodeMCU-t ugyanúgy, mint az ESP12E-t, hiszen csak a kialakításuk más. -
válasz
 Janos250
#4670
üzenetére
Janos250
#4670
üzenetére
köszi, közben sikerült is az IDE alá bevarázsolni a boardot.
Igazából egy ilyet szeretnék vele csinálni. Próbálkoztam sima es8266-al, ez alapján, mert el lenne a legjobb, de ez a világért sem sikerült. -
-

Teasüti
nagyúr
Jézusom bakker mi a fene történt itt az elmúlt héten???

Ha már feljöttek a villamos motorok, akkor be is dobnék egy kérdést:
milyen bizonyossággal lehet elvégezni egy kontárnak egy 230 VAC motoron való apró módosítást, miszerint ne dobáljon már akkora tüskéket a hálózatra kikapcsoláskor, hogy levágja a mellette lévő ATX tápegységet?
Illetve pontosan milyen áramköri elemek is kellenének ide, amit gyárilag valószínűleg kihagytak a berendezésből?
(Érdekességként: ezt miért nem érzi meg a PC tápja úgy 10-15 méternyi vezetékkel arrébb? Bár az egy APC Smart-UPS mögött van, de emlékeim szerint már az UPS előtti időkben se indult soha újra a gép rejtélyes módon.)Mint ahogy sikerült kiderítenem, valójában nem a Nano bolondul meg, hanem a táp mikor kikapcsolom a gőzelszívót. Egy PW_ON újra lehúzására helyreáll a működés. Feltételezem "beaktivál" az egyik beépített védelem és lekapcsolja a tápot. Remélem legalábbis, hogy ez történik, mert most üzemszerűen újraindítja az uC valahányszor ez történik és egy rövid szünet után megy minden tovább, mintha mi sem történt volna.
Remélhetőleg nem lesz rövid életű.Persze nem volt haszontalan szénné szűrni az összes ki- és bemenetet, hisz így legalább kiküszöböltem az egyéb interferenciákat is, amik eltorzították a led szalagok képét (random jelek az adatbuszon?).
Bypass filter figyel minden tápon, Z-diódák minden adatbuszon (szupresszor diódát nem lehet kapni a boltokban, se PTC biztit ). Mikor ezek után is produkálta a jelenséget, akkor már meg kellett próbálnom külön tápról az uC-t, és megdöbbenve látom, hogy hát annak semmi gondja: a táp kapcsol le.
). Mikor ezek után is produkálta a jelenséget, akkor már meg kellett próbálnom külön tápról az uC-t, és megdöbbenve látom, hogy hát annak semmi gondja: a táp kapcsol le.Örülök ennek a tapasztalatnak, végre gyakorlati választ kaptam, illetve - alapos kutatómunkával az ESD protection témakörben - találtam arra a kérdésre, hogy miként érdemes védeni a mikrovezérlőt 24/7-es beépítésnél. ...Amire itt a topikban nemigen kaptam kielégítő válaszokat.

Ennek a kapcsán kérdezem még, hogy egy DC-DC kapcsoló üzemű konverternél kell-e szűrni a tápot?
Vagy mennyire adnak tiszta jelet ezek az ebay-es boost/buck konverterek?MÁS:
A korábbi megbolondulás oka meg a Watchdog maga!
Vmiért a system reset nem működik és ez okozza a pin13 vad villogtatását, amit csak teljes áramtalanítással lehet megoldani. Erre esetleg ötlet? Mi történik ilyenkor? Bootloop?Ezt a beállítást használom, mely Uno-n tökéletesen működött eddig:
//watchdog config
byte resetflag = MCUSR; // save flags for debug
MCUSR = 0; // reset various flags
WDTCSR |= 0b00011000; // see docs, set WDCE, WDE
WDTCSR = 0b01101001; // set WDIE, WDE, and appropriate delay
wdt_reset();Ez azt tudja elvileg, hogy 8 sec timeout után az első megszakításra kódot futtat, a másodikra meg reset-el.
-
Janos250
őstag
-
Janos250
őstag
Na, persze hozzánk a C.H.I.P is csak csavarral jön be a postán! A rendelésnél célországnak Magyarországot nem lehet megadni. Pedig valamit meg kell adni, mert ez alapján számítja a postát. Én megadtam országnak Németországot, városnak Budapestet.
 A kis kínainak ez nem okozott gondot, hogy Németország Budapest nevű városába postázza. Rendben megjött.
A kis kínainak ez nem okozott gondot, hogy Németország Budapest nevű városába postázza. Rendben megjött. -
-

robohw
aktív tag
válasz
 Gergosz2
#4664
üzenetére
Gergosz2
#4664
üzenetére
"Nincs jo, es rossz indukcio, csak egy van
Ahogy mondod. Én sem igazán értem ezt a szükséges rossz meg hasonló megközelítsét."Erre gondoltam:
Ha mágneses térben egy vezetőnek relatív elmozdulása van, és az erővonalaknak van a vezető elmozdulásának irányára merőleges összetevője, a vezetőben feszültség indukálódik. Ha a vezető zárt áramkört képez, az indukált feszültség hatására a körben áram folyik. Ennek az indukált áramnak az iránya mindig olyan, hogy mágneses hatásával gátolni igyekszik az őt létrehozó folyamatot. Jelen esetben a relatív elmozdulást. (tehát fékez, ami nem jó! (by Me))
Az áramkörbe kapcsolt tekercsben, vagy vezetőben, mind bekapcsoláskor, mind pedig kikapcsoláskor feszültség indukálódik. A Lenz-törvény értelmében iránya bekapcsoláskor az áramforrás feszültségével ellentétes, míg kikapcsoláskor azzal megegyező irányú.
Az áramerősség változása a tekercs keresztmetszetén áthaladó erővonalak számának - a fluxusnak - a változását is jelenti. A fluxusváltozás indukálja tehát a jelentkező +, vagy - előjelű többletfeszültséget. Bekapcsoláskor az áram 0-ról I-re növekszik. Az indukálódó feszültség következtében létrejövő áram iránya ellentétes az áramkörben meginduló áram irányával, így a ténylegesen folyó áram lassabban éri el maximumát. Kikapcsoláskor az áram I-ről 0-ra csökken. Az ekkor indukálódó feszültség következtében most viszont, olyan áram jön létre, amely a hirtelen megszűnését késlelteti, tehát a megszakítás után is folyik még áram valameddig a körben.

-
robohw
aktív tag
válasz
Janos250
#4681
üzenetére
"Linux lap 9 $-ért. Igaz, postával 15 $. A múltkor egy pi zero jött kb 3500 Ft-ért. Lassan ezek is arduino árban lesznek."
Rosszul mondod János! Ezek már arduino ár alatt vannak. Gondolok itt az eredeti boardokra, amelyek árképzpse vhogy úgy néz ki, hogy egy uno kb. 6 rugó.
 )
)Egyébként a zero hiába ilyen olcsó, ha egyszer nem lehet kapni, ha meg lehet, akkor egyesével kell rendelni. Mintha ovodában lennénk, nem? ..
A linux board (Next Thing Co, C.H.I.P.) viszont keményen odavert az árával és a teljesítményével a pénzéhes Raspberry alapítványnak. Jól is tette.) -

bardi
senior tag
Mi lehet az oka annak, hogy a serial monitor nem mutat semmit? A programot már rátöltöttem az eszközre, elvileg minden jól be van állítva, jól működik (igazából kalibrálnom kéne, amihez kéne a serial monitor, hogy hova milyen érték kerüljön), de semmit se mutat.
-
Janos250
őstag
Ma hozott a posta egy boardot. Nézegettem, fogalmam se volt, mi az, mit rendeltem. Nagy nehezen kibogarásztam, hogy ez a C.H.I.P nevű, 9 dolláros computer. Mostmár rémlett valami, hogy én leadtam erre korábban egy előrendelést. Még semmit nem csináltam vele, mert nincs itthon hozzá való monitor, de nagyon jónak néz ki. Linux lap 9 $-ért. Igaz, postával 15 $. A múltkor egy pi zero jött kb 3500 Ft-ért. Lassan ezek is arduino árban lesznek.
-

Alu
senior tag
Sziasztok!
Nem rég "kis" segítség alapján építettem egy led kockát. Programozást még csak most tanulgatom, egyszerűbb függvényeket már tudok rá írni, de a bonyolultabb dolgoknál még megakadok. Egy ilyen ponthoz sikerült most is eljutnom és ebben szeretném a segítségeteket kérni:
A mostani uno -t cseréltem le egy mega 2560 -ra. A lábkiosztáson nem változtattam és így az eddigi kóddal nem megy a kocka. Szerintem ezt a részt kellene átírni a kódban, de ehhez sajnos kevés vagyok. Egy ideje már böngészem a netet, de nem jutok vele előrébb. Esetleg valaki tudna ebben segíteni vagy valamiféle útmutatást adni? Előre is köszi!
-
#4679
 Gergosz2
veterán
DrojDtroll
#4673
Gergosz2
veterán
DrojDtroll
#4673
Gergosz2
veterán
válasz
 DrojDtroll
#4673
üzenetére
DrojDtroll
#4673
üzenetére
Ha több analóg bemenetre van szükséged akkor az ESP-t el is felejtheted, mivel csak egyetlen egy analóg bemenete van.
De emellett érdemes belekóstolni egy ST vagy akár egy TI kontrollerbe is. Utóbbi elég jó motor control-ra kihegyezett uC-eket is kínál. A framework-öt szokni kell, viszont baromi jó a MATLAB/Simulink támogatottsága, ami lehetővé teszi, hogy egy Simulink modellből C kódot fordítson, amit egy az egybe küldhetsz is a mikrokontrollerre. Én is most kezdtem el ezzel foglalkozni, egy ilyen fejlesztőkártyával.
-

tvamos
nagyúr
válasz
Janos250
#4676
üzenetére
Nem igy szoktam csinalni, hanem Cube MX-szel szoktam beallitani a timer-eket, pwm-eket, meg az analog i/o-kat. (Ha kell, akkor a dma csatornakat.) Meg van egy csomo peldaprogram, amikbol meg lehet tanulni mindent. Esetleg van stm32 forum is, ahol segitenek, ha kell, de azt meg nem kellett hasznalnom.
En ilyeneket nem irogattam mar 8 eve.
(#4673) DrojDtroll válasza tvamos (#4672) üzenetére
Ha nem feltetlen surgos a dolog, en nem kuzdenek vele. Janos250 szokott ajanlani olyan armos stm32 procis boardokat, amik jol futnak arduino alatt, ha ragaszkodsz a framework-hoz, majd megjon kinabol, elobb-utobb.
Esetleg, ha nem gond, hogy tobb penzt kell raszanni, akkor van a Teensy 3.2 & 3.1.(#4677) Janos250 válasza DrojDtroll (#4673) üzenetére
Hat azt csak akkor, ha nagyon kell neki a kihivas, mert a nagy kuzdelemnek ketes a kimenetele. -
#4677
Janos250
őstag
DrojDtroll
#4673
Janos250
őstag
válasz
DrojDtroll
#4673
üzenetére
Használd tvamos (4675) javaslatát arduino alatt is!
-
Janos250
őstag
Azt ugye minden amatőr fejből vágja, hogy az if után miért ezt kell beütni:
((HAL_ADC_Getstate(&hadc) & HAL_ADC_STATE_REG_EOC ) == HAL_ADC_STATE_REG_EOC )
Hopp, most látom, hogy az egyik helyen az egyik betűt, amit nagynak kellett volna írni, kicsinek írtam. Sebaj, ezt úgyis minden amatőr vágja, hogy hol a hiba.
Ha valaki már egy tucat programot írt, akkor ezt természetesen tudja. Ha nem, akkor előveszi a Reference Manualt és kinézi, melyik regiszter melyik bitjét kell állítani/figyelni.
Aztán vagy fogja és AHHOZ AZ EGY programjához beírja közvetlenül a regiszterek állítását, vagy elkezd bogarászni CMS, HAL, miegymás, és megkeresi, mit hogyan is kell hívni, hogy van elnevezve.
Ha kibogarássza, akkor persze LEGKÖZELEBB már sokkal könnyebb dolga lesz, de elsőre meg nehezebb.
Sok évvel ezelőtt egyszer már valamiért kipróbáltam a KEILt (is). Pár hónappal ezelőtt ismét kedvet kaptam rá, de el is hajítottam:
1. Persze véletlenül se jelent meg az egyik képernyő, ami volt a video tutoriálban, és valamit be kellett állítani. Na ezen átverekedtem magam.
2. Állandóan kiabált, hogy az ingyenes verzióban ezt se, meg azt se szabad. Végre sikerült valamit összehoznom, amit engedett.
3. Na, akkor eltűnt az egyik ablak, amit sehogy se tudtam visszahozni. Sebaj, ez is megoldódott, töltsük fel!
4. Akkor meg az ST-linket nem volt hajlandó kezelni.
Na kedves Keil, egyelőre félre vagy téve, majd ha nem lesz jobb dolgom, újra előveszlek, mert valóban sokkal többet tudsz, mint egy Arduino framework.
Azóta pihen a felinstallált programok között, és várja jobb sorsát.
-
#4675
tvamos
nagyúr
DrojDtroll
#4673
tvamos
nagyúr
válasz
DrojDtroll
#4673
üzenetére
En nagyon keveset hasznalok Arduinot, epp csak a nagyon alap dolgokat. Ha barmi tobb kell, akkor ARM-ot.
Ugy emlekszem, hogy az analog read megvarja a konverzio veget, szoval amig az ad dolgozik. Ha magad csinalod, akkor meg lehet azt csinalni, hogy elinditod a konverziot, csinalsz valami mast, majd visszamesz kiolvasni, es uj konverziot inditani.
Vagy lehet azt is csinalni, hogy megszakitasbol folyamatosan olvasod az osszes bemenetet, es amikor az analog read-et irnad, csak kiolvasod a megfelelo regisztert.
En ezeket a modszereket hasznaltam regen, az assemby korszakban, amikor meg programoztam is. -
#4674
Janos250
őstag
DrojDtroll
#4671
Janos250
őstag
válasz
DrojDtroll
#4671
üzenetére
Egyszerűen azzal, hogy azoknak önmagában többszörös a sebességük.
Ha analogreadet akarsz nagy sebességgel, a hardver ADC elég gyors, digitalwrite meg pláne!
Nem hiszem, hogy asm betét kellene bele.
A legszuperebb persze (szubjektív vélemény!!!!!) az ESP32, de ennek van két baja:
1. nem ARM
2. még nem igazán kiforrott az Arduino illesztése. -
#4672
tvamos
nagyúr
DrojDtroll
#4667
tvamos
nagyúr
válasz
DrojDtroll
#4667
üzenetére
Persze, egy csomoszor. En STM32 nucleo 64 boardokat szoktam hasznalni, mert azokra ra lehet pattintani az Arduino shield-et, ami jol jon, ha van par monster moto shielded, meg solder breadboard shilded.
Mondjuk az arduino frameworkrol leszoktam, mert van a gepemen IAR, es ott megy a debug rendesen. Az STM Studio pl. rohadt jo, latod a kulonbozo baltozokat a kepernyon, hogyan valtoznak. Itt a videon mondjuk Keil van, de bemutatja, mit lehet az STM Studio-val alkotni. Popec! [link] -
#4669
Janos250
őstag
DrojDtroll
#4667
Janos250
őstag
válasz
DrojDtroll
#4667
üzenetére
Persze, UNOnál néhányszor. Ezért én már szinte kizárólag csak STM vagy ESP kontroller alapú boardokat használok. Sokkal gyorsabb, többet tud, korszerűbb, mellesleg még olcsóbb is.
-
#4667
 DrojDtroll
veterán
DrojDtroll
veterán
DrojDtroll
veterán
Sebességproblémába futott már bele valaki?
-
tvamos
nagyúr
Jó amit linkeltél, csak nem elegendő, és felületes ahhoz, hogy megértsd a villamos gépek működését.
Idézek belőle: "Az egyenáramú motor működése a mágneses pólusok vonzásán és taszításán alapul."
Ez igaz is.Rossz, a hasznos teljesítményre hátrányos indukció pedig sajnos létezik.
Persze, hogy van olyan indukció, ami nem hasznos, de legyen az akár motor, akár generátor, a működése az indukción alapszik. -
robohw
aktív tag
"Ezert irtam le, hogyan mukodnek a villamos gepek. Oda tettem linket is, ahol rajtam kivul mas is leirja, mi is az indukalt feszultseg, hogyan keletkezik, es mi a hatasa."
Ezt én tudom, nekem is szakmám az, amiről beszélek, de nem ez volt a kérdés, hanem az, hogy a villamos motorokat mi mozgatja.
Erre a válaszom ugyanaz ami eddig, ezt alá is tudom támasztani egy lektorált tanyanyaggal:
http://harsanyireka.blog.hu/tags/motorok
Idézek belőle: "Az egyenáramú motor működése a mágneses pólusok vonzásán és taszításán alapul."
Rossz, a hasznos teljesítményre hátrányos indukció pedig sajnos létezik. Erre mutat rá a Lenz törvény, például.
-
Gergosz2
veterán
Eddig csak az volt a válasz, hogy "mert csak", ennyit meg a feleségemtől is megkapok bármikor...
Nem nem az volt. Ha kicsit belegondolsz teljesen logikus, hogy sokkal nagyobb frekis PWM jel kell. Általános szabály, hogy a rendszer legkisebb időállandójánál gyorsabban akarjunk beavatkozni. Ezeknél a DC motoroknál ez az időállandó rendszerint a milliszekundumos nagyságrendben van, így teljesen indokolt, hogy kHz es nagyságrendben kapcsolgassunk.
(#4663) tvamos
Nincs jo, es rossz indukcio, csak egy van
Ahogy mondod. Én sem igazán értem ezt a szükséges rossz meg hasonló megközelítsét. Ezt tudja a fizika és pont. Erről az jut eszembe, hogy pl. a szórt induktivitásokra kb. mindenki rossz szemmel gondol. Nem, nem az, kell az áramkorlátozásra. -
tvamos
nagyúr
1. Ide más is jár, szintén segítségért, észleletem szerint jobbára amatőrök és nem tudom miért volna jó, ha a hibás fogalmakat ismernék, tanulnák meg az itt előfordulók. Én legalábbis ezért korrigálok, ha teszem.
Ezert irtam le, hogyan mukodnek a villamos gepek. Oda tettem linket is, ahol rajtam kivul mas is leirja, mi is az indukalt feszultseg, hogyan keletkezik, es mi a hatasa.
Nincs jo, es rossz indukcio, csak egy van. A valtozo magneses ter feszultseget indukal. A valtozo magneses ter meg ugy johet letre, hogy vagy elmozdul a tekercs a mezoben, (mozgasi indukcio,) vagy az aram valtozik a tekercsben, (ez az onindukcio,) es mind a ketto van a motorban is, meg a generatorban is.
(#4662) aryes válasza robohw (#4661) üzenetére
Végre, két nap után választ kaptam az egyik kérdésemre
No, ennek orulok!
Ha megnezed ezen a linken a helyettesito kepet, akkor mar csak a Kirchoff torvenyeket kell ismerni ahoz, hogy megertsd, miert fog "holtpont" lenni: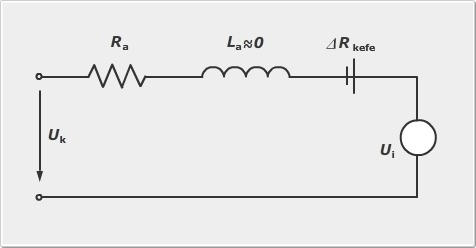
Az Ui indukalt feszultseg jelen esetben a fordulatszammal aranyos. (Nagyjabol.) -
Végre, két nap után választ kaptam az egyik kérdésemre.
Eddig csak az volt a válasz, hogy "mert csak", ennyit meg a feleségemtől is megkapok bármikor...
Mellesleg a holtpontok nálam csak magasabb frekvencián jöttek elő, amikor is >50% kitöltöttség mellett megállt a motor, ennek ellenére így kéne üzemeltetnem a motort, ha eredményt akarok, hát ezt én sosem fogom megérteni, úgyhogy inkább lezárom a témát. Ha gondoljátok, írok a modkerbe egy takarításért! -
robohw
aktív tag
Azért, mert léteznek holtpontok a motor forgása közben (ahogy ezt is írták előttem) és ha a PWM ezen holtpontokon éppen kikapcsol, akkor a motor teljesítményének annyi. Így a frekvenciát hozzá kell hangolni a motor karakterisztikájához. Ezt neked nem kell megtenned, pláne nem patikamérlegen mérve, de ha egyszer 10-50 kHz-et ajánlanak olyanok, akik nálad jobban képben vannak ilyesmivel (lásd az írás szerzőjét például), akkor azt illik megfontolni, legalábbis ha eredményt akarsz.
-
robohw
aktív tag
"Folyamatosan 6.6V-ot kapnak, négyszögjel formájában. Miért kapná meg a motor ennek a tört részét?"
Átlagban kapja a tört részét. De ez éppen elég ahhoz, hogy a motor teljesítményén is meglátszódjon.
Ha én 10 voltot kapcsolgatok, akkor a bekapcsolt állapotban 10 volt jut a motorra, de ha a kitöltési tényezőm csak 25 %, akkor ez azt jelenti, hogy egy perc időtartam alatt a motorom csak 15 másodpercen keresztül ad le 100 %-os teljesítményt. A motor tehetetlensége folytán ez a kimeneten úgy jelentkezik, hogy durván 25 %-ot fog teljesíteni a motor a 100 % helyett.A PWM-es hajtás másik jellemzője, hogy általában nincs 100 % kitöltöttség, tehát a lehetséges maximumnak (feszültség) csak valahányad részét kapja meg a motor.
-
robohw
aktív tag
" akkor mégis mire fel az egész próbálkozás, hogy magasabb frekvencián üzemeltessem?"
Nincs próbálkozás. Javaslat van, a helyes használatra. Próbálkozás nálad van, amikor a dolgok átértése nélkül erőlteted azt, ami szerinted helyes. Csak hát, ezzel egyedül vagy.
Olvasd el ezt:
"Az impulzusszélesség-moduláció (angolul pulse-width modulation, PWM) vagy más néven impulzusidőtartam-moduláció (pulse-duration modulation, PDM) az inerciális elektromos eszközök szabályozására elterjedten alkalmazott technika, melyet a korszerű teljesítményelektronika tett a gyakorlatban is használhatóvá.
A fogyasztóba táplált átlagos elektromos feszültséget és áramerősséget a táp és a fogyasztó között lévő kapcsoló gyors ütemű be- és kikapcsolásával szabályozzák. Minél hosszabb ideig van a kapcsoló a bekapcsolt állapotában a kikapcsolt állapot időtartamához képest, annál nagyobb lesz a fogyasztóba táplált teljesítmény.
A PWM kapcsolási frekvenciájának sokkal magasabbnak kell lennie, mint ami hatással lenne a fogyasztóra. A kapcsolási frekvenciának jellemzően 120 Hz-nek kell lennie egy lámpa fényerőszabályozójában, néhány kHz-től néhány száz kHz-ig terjedőnek egy motorvezérlőben, és jó néhány száz kHz-nek egy hangerősítő és egy számítógépes tápegység esetében."
-
Te írtad:
"a 2.5 - 12 Voltos motor a teljesítményének maximumát nyilván nem fogja leadni 5 volton még akkor sem, ha direktben van járatva, hát még PWM-en keresztül, ami mindjárt azt jelenti, hogy az 5 voltnak is csak tört részét kapja meg."
Folyamatosan 6.6V-ot kapnak, négyszögjel formájában. Miért kapná meg a motor ennek a tört részét?
-
-
PWM-et azért használunk, hogy a teljes feszültséget a motorra kapcsolva, azonos forgatónyomaték mellett kisebb sebességgel tudjuk forgatni a motort. Tudom, mindenkinek a t.ke tele van velem, de! Arra még mindig nem kaptam választ, hogy ha a motor indukciója integrálja a négyszögjelet és egyenfeszültséget csinál belőle, akkor mégis mire fel az egész próbálkozás, hogy magasabb frekvencián üzemeltessem?
-
robohw
aktív tag
"Ezek szerint két napja megy itt az akadémikus szintű vita meg fogalommagyarázás egy olyan állításom körül, ami valójában igaz"
Nem. Egy olyan állításod körül megy a vita, ami nem igaz és soha nem is volt az.
Emellett, azért én veszem a bátorságot, hogy felvilágosítsalak, ahhoz képest elég nagy a szád és eléggé követelőző vagy, amennyire fogalmad sincs a témáról és amennyi sületlenséget összehordasz. Tudod, te itt egyáltalán nem várhatod el, hogy bárki az idejét áldozza arra, hogy segítsen neked. Nem szabhatod meg, hogy ki milyen hozzászólást fogalmaz meg adott kérdésben, azt pedig, hogy kijavítja valaki a tévedéseidet, inkább köszönd, mint kritizáld. -
robohw
aktív tag
1. Ide más is jár, szintén segítségért, észleletem szerint jobbára amatőrök és nem tudom miért volna jó, ha a hibás fogalmakat ismernék, tanulnák meg az itt előfordulók. Én legalábbis ezért korrigálok, ha teszem.
2. Azt más is és én is megjegyeztem, hogy a 30 Hz talán nem a legmegfelelőbb. Én speciel kétszer is. Most, utóbb meg is indokoltam, hogy miért. Olvass vissza. De ha neked a 30 Hz megfelelő, akkor semmi gond, használd úgy.
Azt hozzá kell tennem, hogy az általad alkalmazott motorok hajtóművesek, tehát a kivánt fordulatszámhoz ezt is hozzá kell számolni a PWM frekvenciájának számításánál.Az a fúrógép 800 Wattos, ami félgőzzel meghajtva is elégséges a munkavégzéshez, hiszen vannak 250 watt teljesítményű fúrógépek is. A kis modellmotorok pedig kínaiak, ami annyit tesz, hogy a feltétlenül szükséges anyagmennyiségnél egy tizedgrammal sincs több bennük. Ez nyilván kihat a teljesítményükre is. Az sem mellékes, hogy, mint azt említettem, a 2.5 - 12 Voltos motor a teljesítményének maximumát nyilván nem fogja leadni 5 volton még akkor sem, ha direktben van járatva, hát még PWM-en keresztül, ami mindjárt azt jelenti, hogy az 5 voltnak is csak tört részét kapja meg.
3. A segítségnyújtás olykor kioktatás. Csendben jegyzem meg, beírásaid némelyike azt sugallja, erre egyben-másban rá is szorulnál. Természetesen jó értelemben, segítő szándékkal mondom ezt. Sajnálom, hogy te másképp érezted vagy értelmezted.
-
Ezek szerint két napja megy itt az akadémikus szintű vita meg fogalommagyarázás egy olyan állításom körül (erősebb motornak mindenképp nagyobb az induktív ellenállása), ami valójában igaz, de minden egyes szavamba egyenként beleköttök (lásd: muszáj volt most is kijavítanod az áramot feszültségre). Ezt a sz.rrágást, már bocsánat! Miközben egyikőtök sem tudta megindokolni, hogy miért is nem szabad 30Hz-en üzemeltetni a motoromat, amikor az nekem jó, mert azt csinálja, amit várok, sem azt, hogy a 800W-os fúrógépem motorját miért kHz-es tartományban vezérli az elektronika, mégis nyomatékos marad. Ide segítségért jön az ember, nem kioktatásért...
-
robohw
aktív tag
"Ez azért baj, mert az idezetedben is ott van: Mozgási indukció. Meg Lenz törvény"
És ott van a Mozgási indukció mögött az hogy generátor elv. Viszont ha villamos energiából kivánunk mechanikus munkát (mozgási energiát) "csinálni", akkor az indukció számunkra nem hasznos, hanem káros. Akkor hasznos, ha mechanikai munkából akarunk villamos energiát nyerni, ahogy a generátorok is teszik.
A Lenz törvény: Igen, az is kimondja, hogy az indukálódott feszültség a meghajtó feszültséggel ellenkező irányú, ami nem jó.A H bridge ezért is lett kitalálva, egyebek mellett, hogy legyen hova follyon a képződött ellenirányú elektromos energia. És hát a dióda is az ilyen ellenirányú feszültségek káros hatásainak mérséklésére van beiktatva.
A vasmag és egyebek: Igen, vannak apró veszteségek amik csak melegítik a motort, nem hajtják, hiszen ideális DC motor nem létezik.
-
robohw
aktív tag
"Mondhatjuk azt, hogy az indukció, amiről itt két napja vitatkozunk, úgy alakul ki, hogy a tekercsben futó áram által gerjesztett mágneses tér változása hat vissza a tekercsre, és indukál benne ellenkező irányú áramot?"
Igen, mondhatjuk, de a motor nem ettől az indukált áramtól (feszültségtől) fog forogni és azt hiszem ez volt a lényeg,
Az így indukálódott áram (feszültség) a szükséges rossz, hiszen éppen a szükséges (hasznos) erő ellen hat.
Mintha egy csövön keresztül vizet akarnál vezetni, de cső ellenkező végéből is elindulna a víz áramlása. Ez nyilván nem jó.A te esetedben az a jelentősége ennek, hogy a PWM, mint írtam is korábban, a feszültség be és kikapcsolás, gyors egymásutánban, a kitöltési tényezőnek megfelelő ritmusban, vagy időpillanatokban.
Nos, a kikapcsolás és a bekapcsolás pillanatában is, az indukálódó feszültség iránya az elkívánt ellen hat, tehát ha a PWM frekvenciája 'olyan', akkor az jelentősen ronthat a motor hatásfokán. Ezért kell a frekvenciát jól megválasztani, ami az esetedben módfelett alacsony. -
-
Én mint laikus csak egyet kérdeznék a témában:
Ha egy tekercsre áramot kapcsolunk, az mágneses teret hoz létre a tekercsben.
Ha egy tekercset mágneses térbe helyezek, áramot indukálok.
Mondhatjuk azt, hogy az indukció, amiről itt két napja vitatkozunk, úgy alakul ki, hogy a tekercsben futó áram által gerjesztett mágneses tér változása hat vissza a tekercsre, és indukál benne ellenkező irányú áramot? -
tvamos
nagyúr
Mindenesetre, részemről a vitával felhagyok
Én eddig sem vitatkoztam veled.Sajnos számomra nem derül ki, hogy milyen feszültség indukálódna, hol történne ez és főleg: miért volna szükség erre a motor működéséhez?
Ez azért baj, mert az idezetedben is ott van: Mozgási indukció. Meg Lenz törvény...
Sajnálom én is, hogy nem tudom jobban elmagyarázni. Villamos hajtást könnyebben tudok csinálni, mint magyarázni.
(Tanári diplomám nincs ,csak villamosmérnöki.)Jut eszembe. H-bridge-en mindig van hova follyon az áram, nem gond az önindukció. Amúgy sem, mert nem felejtjük el a freewheeling diódát. szóval az önindukciót is szeretjük. Villamos veszteséget csak az ohmos ellenállás, meg a vasmag örvényáramú (eddy current) vesztesége okoz. (Persze, van még egy-két apróság, ami most nem jut az eszembe...)
Ui: ha jól emlékszem, a kedve veszteség is ohmos.
Meg vannak még morrhår veszteségek persze.Pl. Ebben a jegyzékben leírják, mi van. Az első 20 oldal a dc motor.
-
robohw
aktív tag
A normál, kis méretű DC motoroknál a mozgási energiát (forgást) úgy kapjuk, hogy egy (vagy több) elektromágnest kapcsolgatunk (kommutátor segítségével) és az elektromágnes(ek)ben keletkező mágneses tér valamint a közelében levő állandó mágnes tere egymásra hatással lesz (vonzás, taszítás).
Ezt ügyesen elrendezve kialakul a forgó mozgás. Ebben az esetben sincs szükség indukcióra a folyamat fenntartásához.
Lineáris motor készíthető egy elektromágnes és egy alkalmas méretű, tömegű vastárgy segítségével. Ha a kettő egymáshoz elég közel van, akkor az elektromágnesre feszültséget kapcsolva az magához vonzza a vastárgyat. Ez esetben is elektromos energiát alakítunk mozgási energiává. Több mágnes alkalmas elrendezésével és kapcsolgatásával a folyamat önfenntartóvá tehető, tehát addig mozgatható a vastárgy, amíg a mágnesek feszültséget kapnak. -
robohw
aktív tag
"A fordulatszam, es az indukalt feszultseg nulla.
Amikor elindul, no a fordulatszam, es az indukalt feszultseg is. Ilyenkor mar a vesztesegen eso feszultseggel "sorosan kapcsolodik" az indukalt feszultseg,"Sajnos számomra nem derül ki, hogy milyen feszültség indukálódna, hol történne ez és főleg: miért volna szükség erre a motor működéséhez?
Mindenesetre, részemről a vitával felhagyok, akik követték a beszélgetést, azok számára, hogy ne hagyjak kétségeket a mondanivalómat illetően, az alábbiakat idézem:
"Az alábbi törvények minden villamos gépre igazak és fontos tájékoztatást adnak alapvető működésükről:
1. törvény: A villamos gépek működése két egymáshoz képest relatív nyugalomban lévő villamos vagy mágneses mező kölcsönhatásán alapul.""Az indukció kialakulása alapján két csoportba osztható:
1. Mozgási indukció (generátor elv)
Ha egy mágneses térben vezetőt mozgatunk a mozgás időtartama alatt a vezetőben elektromos feszültség indukálódik. Ezt a jelenséget elektromágneses indukciónak nevezzük.""Az önindukció lehet:
Káros: Nagy menetszámú tekercsek megszakításakor ez ellen úgy védekezünk, hogy a megszakítás pillanatában rövidre zárjuk, vagy a tápfeszültséget túlfeszültség-levezetővel látjuk el.
Hasznos: Kisfeszültségű fényforrások gyújtásakor, gépjárművek gyújtóberendezéseiben.""A fluxus változása olyan feszültséget indukál a tekercsben, mely ellenkező irányú a feszültség forrással vagyis a tápláló feszültséggel. Az indukált feszültség a Lenz-törvény értelmében akadályozza a fluxus növekedését. Az áram megszakításakor keletkező indukált feszültség megegyező irányú a tápláló feszültségével, ami az áram és a fluxus csökkenését akadályozza."
Fentiekhez még talán annyit, hogy közönséges állandómágnesekkel is alkothatunk motort, pontosabban, a mágnesek térerejét, illetve azok egymásra hatását mozgási energiává alakíthatjuk, mégsincs szükség ehhez semmiféle indukcióra.
-
tvamos
nagyúr
Ez nem igy mukodik.
Amig all a motor, csak a motor vesztesegei vannak az aramkorben, (zarlati impedancia,) tehat az aram nagy. Nyomateka van a motornak, de leadott teljesitmenye nincs. A fordulatszam, es az indukalt feszultseg nulla.
Amikor elindul, no a fordulatszam, es az indukalt feszultseg is. Ilyenkor mar a vesztesegen eso feszultseggel "sorosan kapcsolodik" az indukalt feszultseg, (persze ez csak bizonyos elhanyagolasokkal igaz, pl. a magesezesi veszteseget itt elhanyagoltam,) es csokken az aram, (csokken a nyomatek is,) es felporog a motor.
Ennyi azt hiszem eleg egy arduino topicban.(#4642) robohw válasza aryes (#4641) üzenetére
A veszteseg nelkul a dc motor vegtelen nagy aramot venne fel indulaskor. (Amit persze lehetne csokkenteni ugy, hogy vesztesegeket kotunk a korbe...
(#4642) robohw válasza aryes (#4641) üzenetére
Visszaterve a te problemadra, az egy eleg bonyolult ugy, mert kell egy bizonyos feszultseg, hogy elinduljon a motor, es utana sem tudod 0 fordulatrol szabalyozni, hanem lesz egy minimum fordulat, amin stabilan elindul.#
Olyan dolog ez, mint a csuszasi, meg a tapadasi surlodas, ahol a tapadasi nagyobb, mint a csuszasi, szoval ha legyozod a tapadasit, utana sokkal kisebb lesz az ellenallas, es felporog a motor. Ez vonatkozik a csapagyakra is, (fokent, hogy ezekben a kis motorokban egyik, vagy mindket vegen a tengelynek csuszo csapagy van,) es a kefere is. Az is rontja a helyzetet, hogy ahogy kiserletezel, felmelegszik a motorban, es a hajtomuben a zsir, jobban ken, a motor konnyebben forog. Ha lehulik, megint nehezebben indul.
Van egy villamos (vagy inkabb elektro-mechanikus) probelma is, mivel korbefordulas alatt hullamzik a nyomatek. Minel kevesebb a kommutator szeletek szama, annal jobban, es persze annal instabilabb a rendszer.
Ezek a sarga hajtomuves mis kinai motorok nem valami jok, ha finoman akarod szabalyozni oket. -
robohw
aktív tag
Arról polémiát nyitni, hogy az igazság kiderüljön egy-egy téma kapcsán, soha nem értelmetlen. Legalábbis szerintem.
És hát, igen, az autók esetében is igaz, hogy a súrlódás egy szükséges rossz, mivel a súrlódás növeli a befektetendő energiát, csökkenti a hatásfokot, ezért is kenik a csapágyakat, ugyanakkor nehéz lenne megállni egy autóval, ha súrlódás nem létezne.
-
robohw
aktív tag
"Indukcio, es indukalt feszultseg nelkul nincs leadott teljesitmeny. "
Már ha generátorról beszélünk, nem villanymotorról.
A villanymotorok működéséhez nincs szükség sem indukcióra, sem indukált feszültségre (gondolok itt természetesen az önindukció során a működtetni kivánt motorban létrejövő feszültségre).
Az indukció a villamos motorok működése során jelen van, de a villanymotorok számára egy káros, nem kivánatos mellékhatás, mivel az indukált feszültség során meginduló áram iránya éppen ellentétes az őt létrehozó feszültség során létrejövő áram irányával. Pl. be- és kikapcsolás esetén is. Ugyanis ekkor változik számottevően a mágneses mező állapota. -
robohw
aktív tag
válasz
Gergosz2
#4628
üzenetére
"Méretezés szempontjából mind az indukció mind az induktivitás nagyon fontos. "
Igen, fontos, hiszen a motor hatásfoka ezen is múlik, de az elektromos motorokat a mágneses terek egymásra gyakorolt hatása mozgatja, nem az indukció, még akkor is, ha ennek a hatásnak szükségszerű velejárója (szükséges rossz) az indukció.
-

gyapo11
őstag
válasz
Gergosz2
#4628
üzenetére
Szerintem meg inkább tisztázzuk, ha valami nem világos, vagy rosszul tudjuk.
Mit értesz indukció és induktivitás kerveredésen?
Légrésről meg méretezésről nem volt szó, csak az elvekről nagy vonalakban. Nyilván nem akarunk és nem kell motort tervezni meg méretezni ahhoz, hogy az induktivitást megértsük, és hogy arra szükség van-e a motor működéséhez. Bárki építhet egy patkómágnessel meg egy tekerccsel és kommutátorral egy működő motor modellt, és is megtettem annak ideján, és tökéletesen meg lehet érteni vele a működést. Ha leterheljük, és lassan forog, akkor azt is könnyű belátni, hogy az induktivitáson létrejövő árameltolásnak már nincs szerepe, mert sokkal gyorsabban felépül a mágneses mező, mielőtt számításba veendő elmozdulás történne. A motor lefogva is forgatónyomatékot fejt ki, vagyis induktív tényező már nincs, az áram állandósult, egyenletesen folyik. Ebből is látszik, hogy a mágneses mező végzi a munkát azzal, hogy taszítja/vonzza az állandó mágnes pólusait.A tekercsvég sosem vesz részt a nyomaték képzésben, nincs is benne a mágneses térben.
Mindenki tanulta az iskolában a tér ábrázolását erővonalakkal. Valójában az erővonalak sem léteznek, csak szemléltetésképpen használjuk. De a lényeg az, hogy ezek hatása egy kis térrészre összpontosulnak, a tekercsre, sőt annak a végére. Ha megnézünk egy mágnesrudat, annak is a vége vonz legjobban, a közepe felé egyre gyengébben. Én Magyarországon állok, vonz a Himalája is meg az Atlanti óceán víztömege is, meg még sok minden, és mégis pontosan függőlegesnek érzem a gravitáció irányát. Mert összeadódnak, átlagolódnak az erők. Tehát nem elemezzük erővonalanként az erőket, hanem azt tapasztaljuk, hogy a tekercs vége vonz vagy taszít, ez egy ilyen gyakorlati megközelítés.
de jó lenne, ha a motorban nem lenne csak mágneses tér, akkor is forogna
Van ilyen is. Keress rá az elektrosztatikus gépekre.
Ezt lehet, hogy félreolvastad.
Nem lenne csak mágneses tér = nem lenne más mint mágneses tér
vagyis mágneses, de más hatások nélkül, lásd induktivitás. Tehát ha egyszerűen tudnánk kapcsolgatni a mágneses erőt ki-be. A motor vígan pörögne, miközben induktivitás és indukció 0.
Az elektrosztatikus az nem mágneses, tehát más téma. -
Gergosz2
veterán
válasz
 gyapo11
#4626
üzenetére
gyapo11
#4626
üzenetére
szerintem ezt a szálat itt vágjuk el, mert nagyon kevertek. Abban igazad, van, hogy a villamos forgógépeinkben a mágneses tér munkavégző közeg. De itt már kezd keveredni az indukció, induktivitás meg stb. Méretezés szempontjából mind az indukció mind az induktivitás nagyon fontos. A légrés indukciót szoktuk megválasztani és ahhoz méretezzük a tekercselés stb.
közeledő tekercsvéget
A tekercsvég sosem vesz részt a nyomaték képzésben, nincs is benne a mágneses térben.(#4622) tvamos
Soros egyenáramú gép, aszinkron gép, kapcsolt reluktancia gép stb..

de jó lenne, ha a motorban nem lenne csak mágneses tér, akkor is forogna
Van ilyen is. Keress rá az elektrosztatikus gépekre. Kis méretben még van értelme ezeknek is, de mivel a mágneses tér négy nagyságrenddel nagyobb energiát tud tárolni, így nem is kell magyarázni miért az ilyen elven nyomatékot képző gépek terjedtek el.
-
gyapo11
őstag
A villanyóra se forogna anélkül. De ha elképzelünk egy indukció nélküli világot, és a mágneses mező 0 idő alatt épülne föl az áramból, és a kikapcsolás után sem lenne semmiféle tüske, azért az sok helyen jól jönne, de a motoroknál különösen. Vidáman menne minden olcsó-egyszerű fázishasítással vagy pwmmel, nem kellene szívózni a drága frekvenciaváltóval, lépcsős szinuszokkal.
-
gyapo11
őstag
Tudtommal a motorok indukcióból csinálnak mozgási energiát...
Ahogy robohw már megírta, mágneses erőtérből. Az állórészben állandó mágnesek, a forgórész meg tekercs(ek), és a kommutátor váltogatja rajta a polaritást, ezért az egyik mágnes mindig vonzza a közeledő tekercsvéget, a másik meg taszítja a távolodót, ettől forog a motor.
Az induktivitás a fizika miatt van, mert ezek a törvények működnek az univerzumban, de jó lenne, ha a motorban nem lenne csak mágneses tér, akkor is forogna. -
robohw
aktív tag
Persze, hiszen enélkül nem működhetnének áramfejlesztő generátorok, vagy a transzformátorok sem.
Az ő szempontjából rossz az indukció, mivel a PWM esetén x alkalommal kapcsolja le a feszültséget a DC motorokról és ez x alkalommal jelenti az erőtér összeomlását, ennek minden következményével. Erre gondoltam, amikor írtam, hogy az indukció egy szükséges rossz.
Ha annyira rossz volna, a "szükséges" szót ki is hagytam volna. -
robohw
aktív tag
Elolvasva a .pdf tartalmát, számomra kiderült, hogy ez a két kis modellmotor 12 Voltos, tehát ha indirekt táplálod 5 volttal őket, akkor persze, hogy nem képesek teljesítményt leadni.
Már 50 %-os kitöltési tényező mellett is csak két és fél volt jut rájuk átlagban (!), 50 % alatt meg nem kapját meg a névleges minimumukat, így csak terhelik a kimenetet.Az, hogy a speckó szerint ezek 2.5 - 12 Voltos motorok, nem jelenti azt, hogy 2.5 volton is képesek akkora teljesítmény leadására, mint 12 Volton. Ha meg még áramkorlát is van (l9110), akkor pláne nem.
Sztem akkor járnál jól, ha 9 Voltos akkupakkal táplálnád meg a rendszert.
-
robohw
aktív tag
-
-
robohw
aktív tag
"Viszont nincs: jack dugóm, sztereó potméterem, utóbbit a sarki hobbielektronika boltban elég drágán adják."
Nem kizárólag neked írom, inkább általános tájékoztatásképpen, a topikban előfordulóknak, akik hasonló problémával küzdenek, vagy azoknak, akiknek olykor jól jönne egy szkóp.
A PC hangkártyáját szkópként lehet használni egy erre alkalmas, a neten is hozzáférhető ingyenes programmal.
Mindössze egy jack dugó kell hozzá, így, egyéb alkatrész nélkül 0 és +5 V közötti feszültségszint mérhető.
+5 Voltnál magasabb feszültségekhez nagy pontosságú, ún. műszerellenállásokból kell feszültségosztó előtétet készíteni. -
-

fpeter84
senior tag
Nézem az L9110 doksiját, és igazából nem kell se felhúzó, se jelszintillesztés... A test conditions rovatban 9V tápfeszhez azt írja, hogy a bemenő HI jelszint min 2.5V, tehát bőven elégnek kell lennie annak amit a uC tud adni neki - biztos ami biztos alapon egy soros ~1K-t azért odatennék, de más nem kell, az onboard felhúzókat el kell távolítani, nem is értem hogy mi a fenének tették oda őket...
-
robohw
aktív tag
"Tudtommal a motorok indukcióból csinálnak mozgási energiát.."
Nem egészen. A villamos motorok esetében a mágneses tér az ami mozgási energiát csinál.
Az indukció egy szükséges rossz a motorok esetében, ami a mágneses tér változásának következménye.Amiről te beszélsz, az a generátorok esete, de ott is fordítva van, a mozgási energiából lesz indukált feszültség.
-
robohw
aktív tag
"Akkor mégis miért nem működik nálam a pwm magasabb frekvencián?"
Így első körben arra tippelnék, hogy azért, mert valamit nagyon nem úgy csinálsz, ahogy kéne. Pl. dióda van a motor két táppontja között?
A PWM jelek, DC motorok fordulatának szabályozásához, kb. 10-50 Khz-es tartományban optimálisak.
A PWM ugyanakkor nem hullámforma, hanem négyszög. Gyakorlatilag egy kapcsolójel, amelynek a szélessége változtatható, így ha az nulla, akkor a vezérelt fogyasztó kikapcsolt állapotban, ha pedig 100 % akkor folyamatosan bekapcsolt állapotban van. 50 % esetén matematikailag fele akkora fordulatszámon forog egy PWM vezérelt DC motor. A feszültség, amit a jel rákapcsol a fogyasztóra, mindig állandó, rendre a fogyasztó által elvárt névleges feszültség. Ezt szaggatja meg a PWM jel, így lehet elérni a forgatónyomaték viszonylagos állandóságát, kisebb fordulaton.
-
gyapo11
őstag
Motorban nincs nagyon tapasztalatom, de nézzük a transzformátorokat. Egy csengőtrafó rengeteg menetet tartalmaz és kis teljesítményű. Egy combos trafó meg sokkal kevesebb menetszámú. Az is igaz, hogy a kis trafónak kisebb a vas keresztmetszete, de mivel a keresztmetszettel lineárisan, a menetszámmal meg négyzetesen nő az induktivitás, nem lepődnék meg, ha a nagyobb teljesítményű trafónak kisebb lenne.
-
Van itthon két marék ellenállásom, és ha pont olyanom nincs is, nem esek kétségbe, ha kettőből kell összerakni. Bár nem feltételeznéd rólam, de ki tudom számolni sorosan és párhuzamosan is két ellenállás összegét.
Viszont nincs: jack dugóm, sztereó potméterem, utóbbit a sarki hobbielektronika boltban elég drágán adják.Drivert meg vegyen 50$-ért a 3$-os arduinojához, akinek két anyja van.
![;]](//cdn.rios.hu/dl/s/v1.gif)
-
tvamos
nagyúr
-
fpeter84
senior tag
A PWM frekvenciájával még nem kezdtem el játszani, de a motorok erőtlensége, nyomatéktalansága nekem is feltűnt mint említettem... Mire elkezd forogni, már alig változik valamit a fordulatszáma maximumig. Nem igazán volt időm többet játszani vele, de előbb utóbb talán sikerül...
illesztésre nem kell IC, bőven elég csatornánként 1-1 tranzisztor, vagy vannak I2C-hez szánt level converter modulok kompletten, az is jó lehet...
-
válasz
gyapo11
#4603
üzenetére
Akkor választhatok, hogy a hangkártya, vagy az usb port, alaplappal együtt.
Nem nagyon merek ilyeneket csinálni, bár van egy régi netbookom, amit semmi másra nem használok, talán azzal megkockáztatom..."az induktivitásnál nem a W számít, hanem a menetszám meg a vas permeabilitása."
Miért, a kettő nem függ össze? Egy erősebb motor induktivitása talán lehet kevesebb?Gergosz2: ezt az oldalt most találtam. Pont azt írják rajta, amiről eddig beszéltem (bár az okokat nem). Viszont azt írja, hogy magasabb frekvencián melegszik és rövidzárat is okozhat, na most erről a driver fentebb említett elpukkanása jutott eszembe.
Viszont nem tudom, mit kezdjek a kimenetek túlfesz. védelmével. Szintillesztő IC kéne? Nem nagyon látok sehol említeni ilyesmit. Biztos, hogy ekkora veszélyt jelent egy 7V-ra húzott kimenet? -
gyapo11
őstag
Szerintem az induktivitásnál nem a W számít, hanem a menetszám meg a vas permeabilitása.
Logikai alapon, ha más motorok mennek nagyobb frekvenciás pwmmel is, akkor ennél a nem menő motornál mi más oka lehet? A pwm az buta, kapcsolgatja az 5 V-ot vagy akármennyit 0 és max között váltogatva. A frekvencia növelésével egyre gyengébb, mi okozhatja ezt, ha nem az induktivitás? -
válasz
gyapo11
#4599
üzenetére
"100 Hz-es pwm 1/100-ad kitöltéssel 10 kHz-nek megfelelő szélességű impulzusokat dobál a motorra, aminek ekkora frekin elég nagy az induktív ellenállása. Hogyan fejtsen így ki erőt?"
Vs.
"32Hz-en rendes nyomatéka van, de valamiért ahogy emelem a frekit, úgy tűnik el a nyomaték. 32Hz-en 12%-os kitöltéssel is elindul és van ereje, 4kHz-en meg 50%-nál kezd csak forogni, de nincs ereje. "
tvamos:
"Azért pár ellenállás bekötéséhez, meg a feszültség osztó képlet használatához nem kell sok tapasztalat. Vagy nincs hangkártyád?"
Vs.
"Szinte semmi alkatrészem nincs a hangkártyás szkóphoz"
Most komolyan, rosszul fogalmazok, vagy direkt szivattok?
Nem egy eszköz volt már a kezemben, ahol pwm-mel hajtott motorok forogtak, lego mindstorm robottól a fúrócsavarozóig, mindnél magasabb frekvenciás, több kHz-es volt a pwm. Egy 800W-os motornak nincs induktív ellenállása? Biztosan nagyobb, mint az én kis hüvelyujjamnyi motorjaimnak. Akkor mégis miért nem működik nálam a pwm magasabb frekvencián?
-
Janos250
őstag
Neked címzem, de minden amatőr figyelmébe messzemenően ajánlom a következő logikai analizátort:
http://www.ebay.com/itm/141694353386?_trksid=p2057872.m2749.l2649&ssPageName=STRK%3AMEBIDX%3AIT
1800 Ft a szerkentyű, a program ingyen letölthető hozzá, és mellesleg ezzel az eszközzel - ellentétben számos másikkal - még működik is :-)
"Utángyártott" persze, tehát nem nagyon dicsekszünk vele, de szegény ember vízzel főz. "Próbáld ki, ha tetszik, vedd meg az eredetit"
Ez a képernyő mentés is azzal készült, éppen PWM jel vizsgálatára:
https://prohardver.hu/tema/arduino/hsz_3914-3914.html










 ). Mikor ezek után is produkálta a jelenséget, akkor már meg kellett próbálnom külön tápról az uC-t, és megdöbbenve látom, hogy hát annak semmi gondja: a táp kapcsol le.
). Mikor ezek után is produkálta a jelenséget, akkor már meg kellett próbálnom külön tápról az uC-t, és megdöbbenve látom, hogy hát annak semmi gondja: a táp kapcsol le.


![;]](http://cdn.rios.hu/dl/s/v1.gif) Nabla vektorral a motor nem megy.
Nabla vektorral a motor nem megy. 



 )
)















Új hozzászólás Aktív témák
 ekkold
ekkold- 3D nyomtatás
- Gitáros topic
- Fele annyit ér az iPhone Air, mint amennyibe pár hete került
- Csak egy ország kap Exynos 2600-as Galaxy S26 telefonokat?
- AMD Ryzen 9 / 7 / 5 / 3 5***(X) "Zen 3" (AM4)
- BestBuy topik
- Hővezető paszták
- NVIDIA GeForce RTX 5080 / 5090 (GB203 / 202)
- World of Tanks - MMO
- Egér probléma
- További aktív témák...

- T14s Gen4 14" FHD+ IPS érintő Ryzen 5 PRO 7540U 16GB 256GB NVMe magyar vbill ujjolv IR kam gar
- Dell 3410 i5-10310u 8Gb ram 256Gb NVMe, számla, garancia, Magyar bill
- iPad 9 Wifi + Cellular + AJÁNDÉK iPad Pro Leather tok
- Apple iPhone 13 Pro Max 256GB,Átlagos,Dobozával,12 hónap garanciával
- DJI Mini 4 pro Fly More Combo drón szett - Garancia, Care Refresh, PL Filter
- GYÖNYÖRŰ iPhone 13 Pro 256GB Sierra Blue -1 ÉV GARANCIA - Kártyafüggetlen, MS3361
- BESZÁMÍTÁS! Nintendo Switch OLED 64GB +256GB fekete játékkonzol garanciával hibátlan működéssel
- Telefon felvásárlás!! iPhone 15/iPhone 15 Plus/iPhone 15 Pro/iPhone 15 Pro Max
- Telefon felvásárlás!! Apple Watch Series 9/Apple Watch Ultra/Apple Watch Ultra 2
- HIBÁTLAN iPhone 12 Mini 64GB Green -1 ÉV GARANCIA - Kártyafüggetlen, MS3453
Állásajánlatok

Cég: ATW Internet Kft.
Város: Budapest

Cég: PCMENTOR SZERVIZ KFT.
Város: Budapest