Hirdetés
- Milyen videókártyát?
- Házi barkács, gányolás, tákolás, megdöbbentő gépek!
- Ha a koreaiakon múlik, még évekig ingünk-gatyánk rámehet a memóriákra
- Házimozi belépő szinten
- Itt a Valve GŐZGÉP — Steam Machine, mi vagy te? 🧐
- Mégis összejöhet az Apple és az Intel összeborulása?
- Amazon Kindle
- Stratégiai biztonsággal védekeznek a dráguló memóriák ellen a gyártók
- Hogy milyen lett az ASUS ProArt széria csúcsnotesze? Hát ilyen!
- AMD vs. INTEL vs. NVIDIA
- Luck Dragon: Asszociációs játék. :)
- GoodSpeed: A RAM-válság és annak lehetséges hatásai
- Invázió egy novellában 3-4. (Update) +5. fejezet! (18+ nyelvezet)
- Meggyi001: Eldugott helyek Párizsban, amiket jó eséllyel még nem láttál... 2. rész.
- Sapphi: StremHU | Source – Self-hostolható Stremio addon magyar trackerekhez
-

PROHARDVER!
Arduino hardverrel és szoftverrel foglakozó téma. Minden mikrovezérlő ami arduinoval programozható, és minden arduino program, board, és hardverrel kapcsolatos kérdések helye.

Új hozzászólás Aktív témák
-

zsolti_20
senior tag
A 330ohm ötlete innen jött:
[link]De közben sikerült megoldanom. Az RFID olvasó SS_PIN a D53-ra kell mennie, az SD kátyának pedig a D4-re.
Abból következtettem ezt ki, hogy az UNO 10-es lába az SS. Szóval a nanonál is annak kell lennie. És mivel a másik modullal hibátlanul működött, ezért gondoltam elég a mega SS-re csatlakoztatni a PIN-t és valóban elég volt. Még az a két sor sem kell amiről fentebb beszéltünk. Sőt a forráskód sem a hiba beazonosításához.

-

DigitXT
félisten
Egy Uno készlettel kezdtem. Végig vacakoltam a hétszegmenses/LCD kört,
aztán megváltás volt a 320x240-es színes kijelző, sokkal több infó elfér...
(Nyilván az Unora is lehet rendes LCD-t kötni, de nekem az már túl barkács,
nem lehet megúszni, hogy az ember fixre építse vmi műszer dobozba, stb.)Ha nem modulokat veszel, az M5stack se LEGO, ugyanúgy drótokkal megy.
Csak az alapokat nem kell dobozolni, és még egy pici akku is jár hozzá...
Legutóbbi projekt, roller gyors-diagnosztika. Abszolút el lehet játszani vele:
Tavaly a mérlegem vezérlését írtam meg rá, ez is DIY, 5 kg load cell, HX711:

-
zsolti_20
senior tag
Ugy dontottem inkabb cserelem a modult. De ahogy latom a kovetkezo lepcsofok csak az arduino mega?
Igy legalabb bele fer egy oled kijelzo is az aksi kapacitas meresehez.
Javasoltak hogy toroljem a bootloadert ezzrl felszabatitva 1-2kb-ot de akkor meg specialisan tudnam csak programozni. -
-
-
-

Teasüti
nagyúr
Igen. Van egy a madárban, meg egy a telefonban. Legalábbis a komolyabbak a telefont/tabletet használják interfésznek.
Az egyszerűbb, nem autonóm drónoknál ez nem szempont, mert nincs bennük autópilóta.Amúgy azt megfigyeltem már, hogy nem mindig pontos a visszatérés: előfordul, hogy két méterrel a helipad mellett akar leszállni. De csak most ebből a beszélgetésből esett le, hogy lehet nem kéne mozognia a vezérlőnek és akkor nem borul a relatív koordináta rendszer. De igazából csak találgatok, fogalmam sincs hogy működik.

Csak eddig sehogy se tudtam magyarázni mi nem sikerült neki ilyenkor.
De precíziós (kamerával segített) leszállás nélkül se téved 2-3 métereket, szóval biztos van benne vmi turpisság. Nem hinném, hogy a madár értékének a felét csak a gps vevő tenné ki. Sőt, nagy összegben mernék fogadni rá, hogy kommersz vevő van benne ugyanúgy, mint bármely naviban. -
#11805
 tonermagus
aktív tag
Aryes
#11804
tonermagus
aktív tag
Aryes
#11804
tonermagus
aktív tag
Köszi a tippet, ezeket mindenképpen megpróbálom.
Bár az is eléggé aggaszt, hogy volt olyan, hogy elsétáltam 25 méterre a céltól. vártam picit, majd elindultam vissza... szépen számolt egészen 15m-ig, majd miközben ugyan olyan sebességgel haladtam visszafele elkezdett felfele számolni 40-50-ig, majd mikor megálltam a célnál rá pár másodpercre kezdett el csökkenni ismét, és kb. 20sec után talált vissza a ~4-5m-es távolságra
-

Tankblock
aktív tag
Én nem szenvedék ezzel, használj portmanipulálást az 1-2 ciklusidő és nem oszt nem szoroz.
Adj inkább időt a delayhez....Vagy mérd meg scoppal....
Ugye nem külső osszcillátorról hajtod? mert akkor az nem is lesz annyira pontos, de az IR nem is kell annyira ha jól emlékszem, nagyon toleráns...
-
Rádiófrekvencián küldi az adatokat LORA protokoll szerint. 2.4 GHz esetén a wifi hálózat esetleg zavarhat, de ez meg ugye nem azon a frekvencián sugároz (EU 868 MHz).
Ha minden igaz elég nagy távolságokat el lehet kommunikációban érni vele. Még én se próbáltam és igaz kicsit drágább is mint az nrf24l01. -
Akkor még 1 kérdés, nrf24l01 rádiós modulból milyet és honnan érdemes venni? Szeretném kipróbálni egy projektben, de annyi féle változatot találok, hogy azt se tudom, mi micsoda. Az adapter board az például micsoda, és mihez van rá szükség? Anélkül nem is lehet használni a modult? Köszi
-

Janos250
őstag
Igen, ugyanaz, csak az itthoni négyszeres áron (1200 Ft) van postaköltség nélkül, mint a linkelt postával együtt (300 Ft). Igen, azokat állítja. Hogyan? Azt pontosan nem tudom, engem csak addig érdekelt, hogy működik.
Aztán van még pár másik csippel szerelt is, azok is működnek, ha jó drivert használ hozzá az ember. Ez nem is mindig olyan egyszerű, ha működőt akarsz, de vírust se akarsz benne. -
-
Teasüti
nagyúr
Mert nem lemásolni szeretném az egyik csatornát, hanem két független csatornát - amin akár két eltérő kitöltési tényezőt is futhat - szeretnék ellentétes fázisban üzemeltetni. Az inverzet csak az könnyebb megérthetőség miatt hoztam fel. A cél sokkal inkább az volna, hogy a tápot időben egyenletesebben tudjam terhelni.
(#11746) Gergosz2
Köszi!
Egy gyors magyarázatot is kérhetnék?
Gondolom a 127U az az 50%-os kitöltési tényező lesz, és a magic a TCCR regiszterekben keresendő.
Milyen képet mutat a logic analizer más kitöltésnél? Mondjuk 25%-on? A célom az volna, hogy minél kevésbé rángassa meg a tápot, mert az meg nem tudja szabályozni a kimenetét és alkalmanként némi vibrálást követően le is kapcsol. Próbáltam default-nál (~500 Hz) gyorsabban is hajtani, de ez nem oldotta meg a gondot, ellenben csúnyán elkezdett forrósodni a pwm meghajtó. -
#11722
tonermagus
aktív tag
Aryes
#11721
tonermagus
aktív tag
Na ezt megpróbálom.
Egyébként most kicsit aggódom, mert utánaolvastam a dolgoknak. Azt még nem mondtam hogy egy ilyen 12V-os 775-ös motort szeretnék meghajtani az L298N-el, vagy hasonló társaival. A gond az hogy ezek a H-hidak 2A-t tudnak max, ezeknek a motoroknak az áramfelvétele üresjáratban kb ennyi. Gondolom terhelés alatt ez jelentősen megnő és tuti átlépem a 2A-os küszöböt amit a H-híd tud, sőt egy videó alapján terheléskor egy ilyen motor akár 24A-t is felvehet. Ezzel tuti kinyírom a vezérlőt, ugye?
Most már értem miért kell ESC az RC hajók vezérléséhez. Azok akár 60A-t is elbírnak.
Tudtok esetleg olyan H-hidat ami elbírja egy ekkora teljesítményű motor áramfelvételét?
-
#11717
tonermagus
aktív tag
Aryes
#11715
tonermagus
aktív tag
Sajna a Fritzing-ben nem találtam ezt a fajta L289N vezérlőt, így nem tudtam szépen megrajzolni, de linkelek egy képet. Hasonlóan kötöttem be annyi különbséggel, hogy az ENA és ENB lápakat nem vezettem ki az Arduinora hanem hagytam rajta a jumpereket, illetve az 5V-os kimenetre nem kötöttem rá az Arduino VIN lábát. Viszont az L289N GND kivezetést plusszba rákötöttem az Arduino egyik GND lábára (ha jól emlékszem csak így forog a motor és a lenti rajzon is így van).
Illetve gondolom az mindegy, hogy a motor-t milyen polaritással kötöm rá az L289N-re....
Egyéb infó:
- az elem nem mertül le, továbbra is 8V+ van benne.
- ami érdekes volt, hogy szépen lement ~6V-ról pár másodperc alatt 2V alá. Ha kikapcsoltam, vártam picit akkor kicsit magasabb V-on pörgött mint amikor kikapcsoltam. Minél többet vártam két beindítás között annál magasabb V-ról indult. Melegedést nem éreztem sehol a nyákon.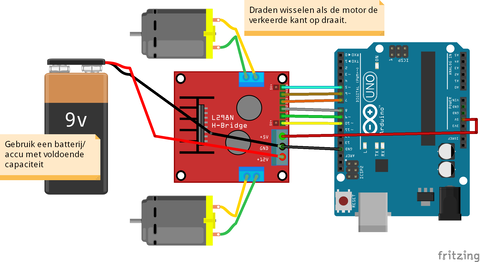
-
#11714
tonermagus
aktív tag
Aryes
#11713
tonermagus
aktív tag
Ahogy sejtettem, a programmal nincs gond, és úgy tűnik hogy az L289N-t sem sütöttem meg mert ma megpróbáltam újra és működött... Viszont azt figyeltem meg, hogy 10 sec folyamatos terhelés mellett hirtelen a motor elkezdett jelentősen lelassulni.
Szeretem végre műszert és kimértem a feszültséget, 6V környékén működött bekapcsoláskor, majd 10 sec után elkezdett lecsökkenni egészen 1,2V-ig mértem...
Normális ez a hatalmas feszültségesés? Miért lehet ez?
Egy 9V-os elemről működtettem ezt a 3-6V-os kis DC motort... -
#11712
tonermagus
aktív tag
Aryes
#11711
tonermagus
aktív tag
Köszönöm a sok segítséget!
Igen, megírtad és meg is jegyeztem
 Sajna még csak az L289N jött meg, így egyenlőre azzal játszom.
Sajna még csak az L289N jött meg, így egyenlőre azzal játszom.Viszont tegnap érdekes dologra lettem figyelmes: A bal oldali motor sokkal gyorsabban forog mint a jobb oldali... A jobb szinte csak meg-meg fordul. Pedig a kód tuti jó, ugyan az mint a bal oldalinál, csak nyilván IN1-IN2 helyett IN3-IN4-re küldi a vezérlést eltérő feltételnél az Arduino. Kipróbáltam másik motorral is ugyan azt produkálja.. Sőt egy idő után már meg sem mozdította a motor-t csak az Arduinon világít a beépített LED (a bal oldali működtetést közben nem világít, tehát ez tuti jelez valamit). Ez mitől lehet?
-
#11708
tonermagus
aktív tag
Aryes
#11693
tonermagus
aktív tag
Elméletileg Szénkefés és Szénkefe nélküli motorokhoz is van ESC...
Nekem is az jött le hogy ez gyakorlatilag egy H-híd, elvileg csak annyi a dolga, hogy a forgásirány és sebességet szabályozza. Nem vagyok nagy elektroműszerész guru, de úgy gondolom ezt az L289N is tudja (bocsi, hogy mindig ezt hozom fel, de nekem ilyen van, ezért példálózok vele) hiszen azzal is lehet irányt, és PWM-en keresztül sebességet is állítani... Tehát akkor ergo nincs szükségem ESC-re, ugye?illetve még egy kérdés: tegyük fel ha nem korlátozom PWM-el a sebességet, 11,1 V-os LiPoról működtetem az L289N-t akkor mekkora V-ot nyom ki a motorra? Lejön az a kb. 2V-os veszteség, és ~9,1V-on pörgeti a motort vagy leredukálja 5V-ra? Ezt nem vágom és műszerem sincs megmérni
Csak azért mert jelenleg egy 3-6V-os motort kötöttem rá Jah, és ha nem mondtam volna még akkor hülye is vagyok az elektronikához
Egyébként ma jött meg az arduino kezdőszettem és tök büszke vagyok rá, hogy pár óra alatt kiépítettem egy áramkört, amivel egy joystick segítségével 2 motort irányítok L289N-en keresztül
-
Nem stimmel.
A filename kiírásánál kéne, hogy hibás legyen.
char filename[] = "00000000.TXT";
char masodik[] = "00000000.TXT";
char dir[] = "asd/";A filename és a masodik is 13 elemű változó (12+\0).
sprintf(masodik, "%s%02d%02d%02d.TXT",konyvtar, now.minute(),now.month(),now.year());
Itt 17 karaktert írsz a masodik változóba, felülírva a dir változót is (írasd csak ki és meglátod)
Utána itt
sprintf(filename, "%s%02d%02d%02d.TXT",konyvtar2, now.minute(),now.month(),now.year());
felülírod a "masodik" elejét, így olvad össze.
De csak akkor van értelme, ha a fenti két változó eredetileg fordítva helyezkedik el a RAM-ban. -
zsolti_20
senior tag
-
Teasüti
nagyúr
Gondoltam annyit tesz, hogy Non Volatile Storage. De csak tippelek.

Ez Arduino környezetben az EEPROM, vagy ESP-nél annak a szimulációja a ROM-ban.SPIFFS meg amennyire értem egy csatolt partíció, amit futás közben lehet írni/olvasni, mint egy SD kártyát.
Itt lehet letárolni mondjuk a webserver-hez használt fájlokat, ha basic html-nél többre volna szükség. Mondjuk képek beillesztésére, vagy ilyesmi. -
#11608
tonermagus
aktív tag
Aryes
#11607
tonermagus
aktív tag
Wow köszi!
Most még párszor átolvasom hogy értelmezni tudjam, de pl. fogalmam sem volt ilyenekről, hogy feszültségesés, stb... Lesz még minek utána néznem.
Ettől függetlenül az általam megrendelt L298N is tudok dolgozni csak rosszabb lesz a hatékonysága? Sima pici DC motorokat rendeltem hozzá. Ezekkel csak tesztelni akarom a programot (előre-hátra menet, gyorsítás, lassítás). Rendeltem belőlük vagy 10-et, ha esetleg leégetem őket
-
-

Izeka82
csendes tag
Köszi! Egy 128x64-es kijelző, egy nrf24l01 rádió, egy valamilyen hőmérő és egy mozgásérzékelő. A kijelző SPI-n megy, azt nem tudom elég-e neki a 3-3V, de ha nem van itthon szintillesztőm. Lehet, hogy overkill nano helyett, de a nano memóriájának a 65%-nál tartok, és még csak most kezdtem el
-
zsolti_20
senior tag
-
zsolti_20
senior tag
Nem tudom csak vesztegettem az időm vagy sem az arduinoval, de majdnem egész este ébren voltam hogy végezzek a szoftverrel. Mire kb 90% lett és a végére értem annyi mindent kellene módosítani egy új kártya regisztrálásához hogy az rengeteg, és minden felhasználó megdobná a szoftvert elég sok sorral. Így kukázom az arduinos megoldást és hallgatok rád amit kellett volna az első perctől aztán egy ESP8266-ra alapozok adatbázisssal, mert másképp ez nem fog menni. Max arra jó volt az egész hogy megismertem az RFID és az USB író/olvasó működését.
-
zsolti_20
senior tag
Igen sikerült működésre bírnom a dolgot. Jelenleg már a pendrive írással kísérletezek. Nagyon tetszik ez az RFID olvasó. Kellene fog még egy modul amivel az időt tudom rögzíteni és meg is vagyok. Aztán jöhet a finomhangolás és egy program C#-ban amit átláthatóvá teszi a TXT-t, esetleg átkonvertálja excelbe vagy statisztikát készít.
Örök hálás a sok segítségért.
-
-
zsolti_20
senior tag
-
zsolti_20
senior tag
Nem valthatom le sajnos a pendrivet semmivel, mert egyszerusiteni kell ahogy csak lehetseges. De ez a web, tavoli eleres meg az adatbazis sokat szamit nekem.
Szeretnek kesobb epiteni egy olyan robotot ami kepes egyenesen haladni es egy csikot rajzolni a talajra egy szobaban. Van erre mar kitalalt dolog? Lattam a vonalkoveto robotokat de itt epp a vonal lerakasa lenne a lenyeg
-
zsolti_20
senior tag
Köszönöm szépen a válaszokat és tippeket, végig fogom nézni a lehetőségeket amiket ajánlottál. Érdekes alternatívák és ismeretlen eszközök így tudom bővíteni a tudásom.
Jobb választás lenne NFC olvasóval megoldani? Erre gondolok. NFC-nél több lehetőségem van módosítani?
ESP32 érdekes tűnik számomra. Még soha nem hallottam róla. Ez arduino kompatibilis eszköz? Vagy hogy képzeljem el?
-
Bocs, de leírom, hátha hasznát veszed.
Ha nekem kéne ezt megcsinálom, biztosan esp-t használnék (8266-ot vagy esp32-t). Egyrészt mert beépített flash van rajta, amit lehet pendrive helyett használni, másrészt mert van hozzá sqlite3 adatbázis lib, ami képes az SPIFFS-en létrehozott adatbázist írni-olvasni! (igazság szerint SD kártyára létrehozott adatbázist is támogat natívan, SPI kommunikációval) Plusz lehet hálózaton keresztül adminisztrálni, ami azt jelenti, hogy ha új szavazót kell új rfid kártyával regisztrálni, azt böngészőből meg lehet tenni, webes felületen. Ugyanígy az eredményeket is le lehet kérdezni. Lehet jelszóval védeni az egészet, míg egy pendrive bárki számára hozzáférhető (feltéve, hogy titkos/érzékeny adat a szavazás eredménye).
A txt fájl egyik hátulütője, hogy nehéz visszaolvasni belőle, hogy ki szavazott már és ki nem, míg adatbázissal ezt nagyon egyszerűen meg lehet oldani. -
zsolti_20
senior tag
Ez ezt szavazó gép szeruseg lesz rf taggal ellatva. Mondjuk 10 ember szavazhat A, B, C vagy D-re. Lajos oda nyomja az rf tagját és az arduino menti ezt a pendrivera. Időponttal együtt. Később felkerul a PC-re a TXT fájl és látják hogy Lajos 14:35:11-kor B-re szavazott. De a kérdés hogy az rf tag azonosítja módosítható? Van neki egy tag-ne mondjuk E5 B9 F3 H4 és ezt modositanam arra mondjuk hogy Lajos. Így ey kerülne mentesre és nem kellene mindig újra húzni a szoftvert az arduino hanem csak a kártyát kell atirnom és ennek az azonosítja kerül a pendrivera.
-
zsolti_20
senior tag
Igen énsi így oldanám meg ahogy írtad de fontos jelen esetben hogy pendrivera tudjak menteni. Akihez kerül később a feldolgozott adat kb 60 év körüli idős hölgy akinek a szövegkezelő megnyitása is elég nagy feladat. Nem szeretném ilyennel terhelni hogy kártyaolvasó és hasonló. Hanem csak pendrive bedug és látja az adatokat.
-
zsolti_20
senior tag
-
Megvan a megfejtése a Digispark anomáliának. Leírom, hátha később valaki hasonló problémával fog küzdeni.
Írták pár helyen, hogy elég válogatós az usb portokra, ha nem működik, dugjuk át másik portba, alaplapira stb. Mivel laptopom van, belső usb hub-bal, és így is kevés a külső port, ezért az egér, billentyűzet egy külső usb hub-ra van dugva. Addig dugdostam a Digispark-ot mindenhová, hogy végül kipróbáltam a hub-ba is, és voilá! Elkezdte telepíteni a drivert. Aztán...Ott se ismerte fel többet.

Ekkor elővettem a szekrényből egy másik usb hub-ot, és abba dugva már települt a driver és fel is tudtam programozni a micronucleus isp-vel.
Ezután elindult végre a keyboard sketch is. Ezután átdugtam a laptop saját usb portjába, és...
Megint semmi.
Ekkor kihúztam az összes usb eszközt a laptopból, és csak a Digispark-ot dugtam be, és... Siker! Tehát a megfejtés: mivel az usb kommunikáció 16.5MHz órajelet igényel, ami eltér a saját belső órajelétől, az usb portról veszi az órajelet, bedugáskor szinkronizálja magát. Ha ez nem sikerül, akkor nem tud bootolni, és a windows se ismeri fel, nem tud hozzá drivert telepíteni stb. Úgy tűnik, hogy nálam ezt valamelyik eszköz megakadályozta.
Ennek folyománya, hogy ha Digispark (Default - 16.5mhz) board van kiválasztva fordításkor, és utána nem élő usb hub-ba van dugva (hanem usb töltőfejbe, vagy power bank-ba), akkor a kód sosem fog elindulni! (Ez csak most tudatosult bennem, mert ezt így még sehol nem láttam leírva, pedig egy hete bújom a fórumokat... ) Így csak a kimondott usb-s feladatokra lesz alkalmas (keyboard, mouse, joystick emuláció). Ha vki micronucleus isp-vel szeretne kódot feltölteni, aztán power bankról, vagy külső akksiról üzemelteni, akkor a Digispark (16mhz - No USB) board-ot kell hozzá kiválasztani.
-
A master az tápról megy, így lemerülni nem tud, max áramszünet esetén vagy ha én áramtalanítom akkor történhet valami. Már párszor újraflasheltem, változtatva a tömb méretével, de ugyan az történik. Ez a webszerveres dolog valamiért nem tetszik neki vagy a sok adat. Ezért gondoltam rá, lehet nem ESP-n kellene loggolnom.
-

op9
aktív tag
Hát, ha csak a bootloadere hiányzik, akkor az még inkább egy production ready készülék, mert legalább nem kell várni vele, csak az upload macerásabb.
Ha rátöltöd a Digispark Keyboard példát és nyitsz valami Notepad++-t, akkor az működik?
Mert akkor USB-n is van kommunikáció.#include "DigiKeyboard.h"
void setup() {
}
void loop() {
DigiKeyboard.sendKeyStroke(0);
DigiKeyboard.println("Hello Digispark!");
DigiKeyboard.delay(5000);
} -

Béééla
őstag
-
op9
aktív tag
Bár tényleg nem vagyok benne a témában, csak most nézegettem, de itt van pár ötlet még. (digistump driver reinstall, zadig-gal feltelepíteni a drivert)
Neki másik USB portba kellett dugni.
Én az alaplapi USB 2.0-t használtam, ami ki volt vezetve a gép elejére.Azt tudom, h van olyan bootloader verzió is, ami kihagyja azt az első 5mp-et, nem tudom, h nem-e olyan került fel rá, bár írtad, h egy csomóval kipróbáltad.
Nekem 1.5 volt rajta, és ezt tettem fel a 2.0.4-es CLI-vel. -
op9
aktív tag
Köszi a választ!
Ahogy nézem nem hardveres gond lesz.
Azóta még keresgéltem, és az eladó feedbackjeiben az "Additional feedback" részben írják, hogy már olyan verziókat küldenek, amiken nincsen bootloader, és ezért nem őrzi meg a feltöltött kódot.
Most keresem, hogy milyen módon lehet bootloadert rátölteni, de csak azt látom, h egy Arduino kell hozzá ISP-ként, és úgy lehetséges. Nekem sajna nincs Arduino-m, még azt nézem, hogy meg lehet-e oldani, hogy az egyik ATTiny85-öt használnám ISP-nek. -
Így most megy véégre, baromi jó móka tankozni. Persze nem tökéletes, mert a két tök egyforma motor mégse az, így nehéz egyenesben tartani. Túl gyorsan se lehet vele csapatni, mert ledobhatja a lánctalpat. No, mindenesetre örülök, hogy megy egyáltalán.
ja, meg csúnya is szegény jármű.
Következik a teherautó... esp32-vel. -
Köszönöm.
Ha közvetlenül a Wemosra dugom rá a tápot (~8.4V teli cellákkal, most töltöttem) a gnd+vin-re akkor is csak villan egyet, és semmi más. Módosítottam a programot, mindhárom pint low-ra állítottam, usb-vel ok.
Csak azt nem értem, hogy a másik shielddel még ment... Lehet megsérült, mikor elfüstölt a másik motor shield? Ott 12,6V is lehetett teli aksival. -
Igazából fingom sincs, mi volt a baja, de végül csak elindult. Előtte rebootolt vagy 50x...
Még volt logikai hiba, mert a fordulatszámokkal trükközni kell, hogy mindkettő talp előre/hátra mondjuk 0-200 között menjen. A 200 is gyors, és csak 50 körül indul.
Így ha usb-n van, akkor megy normálisan. Ha nincs, akkor viszont megőrül. Amint áramot adok neki, pörgeti az egyik motort maxon és ennyi. Flash közben is szokta, elég idegesítő.
Ha usb-n van, és újra rátöltöm a programot, akkor jó, olyan mintha akkor megkapná a jelet, hogy motorok off... Sőt, ha menet közben lehúzom az usb-ről, akkor is jó amíg nem áramtalanítom. Ezen a lapon nincs egy normális reset se, olyan mintha egyik gombja se indítaná újra. Talán sok ennek is a 3db aksi, elég meleg a motorvezérlő, holnap az egyik helyére beforrasztok egy drótot. -
Ugyanabba futottam bele, mint a Wemosnál is, hogy az udp példáknál a router adatai kellettek volna, nem AP-ként üzemel a lap. Végül azt megoldottam, megy a korábbi kóddal. Sokkal jobb a wifije a DoIt-nak, mint a Wemosnak.
Utána újabb problémába ütköztem, ESP32-nél nincs analogWrite, de végül találtam pwm-es példát. A led fade ok, a motor vezérlése még folyamatban, nem teljesen értem a kódot. A resolution miért 8? Amit tippeltem azért?
L293d motorvezérlővel menne a 2 dc motor. Nekem kell az en1 meg en2, vagy menni fog a jumperrel? Tulajdonképpen a jumper ebben az esetben alapból engedélyezi a motorokat? Van másik fajta leírás, ott engedélyezést ír az ábra, ezen meg pwm-et. De a Wemos-szal mikor az analogWrite-tal teszteltem akkor simán az in1,in2-re adtam a pwm értéket.
Akkor ebben az esetben pl.: ledcWrite(0, 100); Nyilván a 100 helyett majd kap egy változót udp-n keresztül.
Éjjel valamit írtam még, de nem ment a motor, csak a ledek villogtak a vezérlőn. Nincs még összeforrasztva a motor a kábelekkel, lehet simán nem érintkezett. Nem a builtin leddel teszteltem, hanem a gpio 13,12-vel.// the number of the LED pin
const int ledPin = 2;
// setting PWM properties
const int freq = 5000;
const int ledChannel = 0;
const int resolution = 8; //Ez itt miért 8? Arra tippelek, hogy 2^8=256, és ennyi lesz a fordulatszám tartomány
void setup(){
// configure LED PWM functionalitites
ledcSetup(ledChannel, freq, resolution);
// attach the channel to the GPIO to be controlled
ledcAttachPin(ledPin, ledChannel);
}
void loop(){
// increase the LED brightness
for(int dutyCycle = 0; dutyCycle <= 255; dutyCycle++){
// changing the LED brightness with PWM
ledcWrite(ledChannel, dutyCycle);
delay(15);
}
// decrease the LED brightness
for(int dutyCycle = 255; dutyCycle >= 0; dutyCycle--){
// changing the LED brightness with PWM
ledcWrite(ledChannel, dutyCycle);
delay(15);
}
} -
-
ok, köszönöm! Szét vagyok esve teljesen. Sokk volt most a feladat, meg a kocsit is meghúztam...
Az S-sorra kell kötni ráadásul nem a V-re... Így már megy a pwm is, meg az előre/hátra menet is.
Viszont az a gáz, hogy összesen 4 pin használható, az meg édeskevés. Ugyanott tartok, ahol 3 hónapja, sehol. Na jó nem sehol, mert legalább 2-3 kört már ment, meg van udp, wifi stb Még az jutott eszembe, hogy ez a Wemos tudna-e kommunikálni egy másikkal? Olyat még sose próbáltam. Ha igen, akkor a másikról mehetne a világítás vezérlés, esetleg csörlő/daru. Bár a forrasztó páka továbbra se ért ide, így a ledes része továbbra sincs megcsinálva.
szerk: megtaláltam, i2c-n keresztül lehetneIlletve van még kérdésem. Az ok, hogy így 2db dc motort tudnék esetleg vezérelni, de nekem 1 servo+1dc kéne. (van "c" verzió is, akkor lánctalpas lesz, annak nem kell kormány) Azt nem lehetne még valahová bekötni ezen a sensor sheilden? Illetve a servo része, pinjei még nem döglöttek meg a másik motor vezérlőnek, csak azt nem szívesen használnám már.











 nemsokara haza erek tesztelem a kodot aztan negosztom a tapasztalatom.
nemsokara haza erek tesztelem a kodot aztan negosztom a tapasztalatom. Érdekes megoldás
Érdekes megoldás 





















Új hozzászólás Aktív témák
 ekkold
ekkold- Allegro vélemények - tapasztalatok
- Milyen videókártyát?
- Router gondok
- One otthoni szolgáltatások (TV, internet, telefon)
- BinX
- Megette az internet felét az AI?
- Kertészet, mezőgazdaság topik
- Házi barkács, gányolás, tákolás, megdöbbentő gépek!
- Vicces képek
- Ha a koreaiakon múlik, még évekig ingünk-gatyánk rámehet a memóriákra
- További aktív témák...

- Új, bontatlan G.SKILL 32GB (2x16GB) KIT DDR5 6000MHz CL36 Ripjaws M5 Neo RGB White EXPO - 10 év gari
- Új, bontatlan ADATA XPG 32GB (2x16GB) KIT DDR5 6000MHz CL30 Lancer Blade Black XMP/EXPO - 10 év gari
- Új, bontatlan ADATA XPG 48GB (2x24GB) KIT DDR5 6000MHz CL30 Lancer Blade RGB Black - 10 év garival!
- Bontatlan Logitech MX Master 3S grafitszürke színben eladó!
- Apple Airpods Pro 2 (USB-C, Magsafe) kifogástalan állapotban eladó!
- LÉZEREZÉS! külföldi billentyűzet magyarra kb. 20-30p alatt!
- Eladó egy oneplus 9 pro 256/12
- BESZÁMÍTÁS! Nintendo Switch OLED 64GB +256GB fekete játékkonzol garanciával hibátlan működéssel
- Telefon felvásárlás!! iPhone 13 Mini/iPhone 13/iPhone 13 Pro/iPhone 13 Pro Max
- Apple iPhone 13 Pro / 128GB / Kártyafüggetlen / 12Hó garancia / Akku : 100%
Állásajánlatok

Cég: PCMENTOR SZERVIZ KFT.
Város: Budapest

Cég: BroadBit Hungary Kft.
Város: Budakeszi