- Bluetooth hangszórók
- Modding és elektronikai kérdések
- Intel Core i5 / i7 / i9 "Alder Lake-Raptor Lake/Refresh" (LGA1700)
- TCL LCD és LED TV-k
- Philips LCD és LED TV-k
- Dell notebook topic
- Épített vízhűtés (nem kompakt) topic
- VR topik (Oculus Rift, stb.)
- Bemutatkoztak a Microsoft aktuális Surface gépei
- OLED TV topic
Hirdetés
-


Spyra: nagynyomású, akkus, automata vízipuska
lo Type-C port, egy töltéssel 2200 lövés, több, mint 2 kg-os súly, automata víz felszívás... Start the epic! :)
-


Folyamatosan hazudott a bitcoin állítólagos feltalálója
it Egy brit bíró szerint Craig Wright, a bitcoin állítólagos feltalálója folyamatosan hazudott és bizonyítékot hamisított.
-


A két Poco F6 mellett érkezik a Poco Pad is
ma A Poco első táblagépe is egy Redmi termék más néven.






-

PROHARDVER!
Arduino hardverrel és szoftverrel foglakozó téma. Minden mikrovezérlő ami arduinoval programozható, és minden arduino program, board, és hardverrel kapcsolatos kérdések helye.

Új hozzászólás Aktív témák
-
-
#13504
 tonermagus
aktív tag
tonermagus
aktív tag
tonermagus
aktív tag
SZiasztok!
Hátha ti tudtok segíteni.
Valaki vezérelt már Flysky IBUS-t Arduinoval? Az alábbi leírás szerint összeraktam, a Flysky vevő IBUS portját a Serial2-re tettem, viszont a távirányítón nem látom a szenzort
https://github.com/bmellink/IBusBM
Kicsit részletesebben: A flysky FS-ia6B vevő a +5V-ot és a GND-t is az arduinorol kapja ideiglenesen. Arduino Mega-t használok, annak a 16-17-es lábát, ami alapból Serial2 TX és RX. Ezt így kötöttem össze:
Kérdés hogy nekem kell-e ez a párhuzamosítás? Vagy Elég lenne csak a 16-os TX csatit rákötni a vevő IBUS-ra?
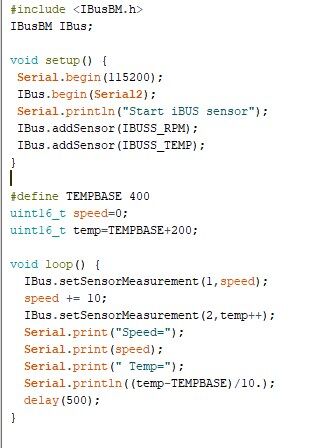
Az Arduinora feltöltöttem az alábbi kódot:
A vevőt és az adót össze bindoltam, majd az RX menüben kikerestem a látható senosokat, és sajnos ott csak a gyári 3 db szerepel, az arudioé nem

A célom az lenne, hogy az arduino generál egy számot, amit a vevő IBUS-án keresztül átküldi, majd azt a adó (Flysky FS-i6) kijelzőjén látni fogok. Ugyebár a sensorok működnek ilyen módon, tehát egy feszültség szenzor által mért értket látok az adón, de az arudino-t nem ismeri fel szenzorként, pedig a IBUSBM library elvileg pont erre való.
Ti elég nagy guruk vagytok, mit rontottam el?
-
#13505
 Aryes
nagyúr
tonermagus
#13504
Aryes
nagyúr
tonermagus
#13504
válasz
 tonermagus
#13504
üzenetére
tonermagus
#13504
üzenetére
Semmit nem tudok erről az eszközről, feltételezem, hogy a beállított baud érték helyes. Csak annyit tudok mondani, hogy cseréld meg az RX és a TX lábat, hátha felcserélted véletlenül.
[ Szerkesztve ]
-

FeniX-
aktív tag
Sziasztok, szerintetek van gyakorlati haszna, ha egy hosszú működésre tervezett arduinonál egy analóg hőmérséklet szenzort (lm35) nem a konstans 5 voltos lábra kötök, hanem mielőtt mérni szeretnék egy 'bármelyik' szabad kimeneti pin-ről kapná az 5 voltot, amit utána lekapcsolok, ha nincs mérés?
Mondjuk 1 ciklusban mérnék 1-et, aztán ventillátort kapcsolok, ledet világítok, és eltelik fél perc, mire következik az új ciklus. -
FeniX-
aktív tag
válasz
 FeniX-
#13506
üzenetére
FeniX-
#13506
üzenetére
Bár, most gyorsan összedobtam egy teszt áramkört, és azt látom, hogy ingadozik a kapott érték a mérésnél... így nem jó.
Szerk.: ha beteszek a pin 5v bekapcsolása és az analogRead közé egy 600ms-es delay-t, akkor viszont jó.

Akkor maradok ennél a megoldásnál.[ Szerkesztve ]
-
válasz
FeniX-
#13507
üzenetére
Jobban teszed, ha a pin-t inkább sink módban használod, vagyis a szenzort a +5V és a pin közé kötöd, mert a pin úgy nagyobb áramot tud elviselni (az uno source-ként asszem 28mA, sink-ként 40mA), de az egésznek csak akkor van értelme, ha akkumulátoros üzemben használod, akkor lehet némi energiát spórolni így, külső táp mellett nem sok haszna van.
-
#13510
 Tankblock
aktív tag
tonermagus
#13504
Tankblock
aktív tag
tonermagus
#13504
Tankblock
aktív tag
válasz
tonermagus
#13504
üzenetére
Szia,
Bekötési hiba lehet.
Diódát jól kötötted be?
Bekapcsolás után az adó működik rendesen? Servo kontroll pl megy-e?Release the Beast....
-
#13511
tonermagus
aktív tag
Tankblock
#13510
tonermagus
aktív tag
válasz
 Tankblock
#13510
üzenetére
Tankblock
#13510
üzenetére
Elméletileg mindent jól csináltam... Egy dolgot kivéve amit most vettem észre:
IBusSensor.begin(Serial2);helyettIBus.begin(Serial2)-t használtam
Nagyon remélem hogy ez lesz a hiba. Ahol csak szervóvezérlés van ott az Ibus.begin(Serial1)-t használja. Ahol már vegyes (szervó+szenzor) ottIBusServo.begin(Serial1);ésIBusSensor.begin(Serial2)-t használ.
Egyébként Te használtál már ilyet? Így megfelelően összerakva a távirányítón látnom kellene 2 újabb szenzort ami az Arduino által küldött növekvő sebesség és hőmérséklet változó értékeit jelenítené meg? -

kesztió
aktív tag
Kedves fórumlakók,
Egy Arduino Nano ki- és bemeneteire szeretnék csatlakozni szalagkábellel. A legelegánsabb megoldás a szabványos, tisztességes verzió, azaz a tüskesorra húzott szalagkábel-csatlakozó, de egyrészt nem nagyon van erre helyem, másrészt kissé pazarlásnak érzem az oldható csatlakozást olyan helyre, ahol erre semmi szükség nincsen. A legegyszerűbb pedig az, ha a szalagkábelt direktben, szálanként beleforrasztom a furatokba. Ez viszont mechanikai szempontból aggályos, és az az igazság, eléggé amatőr megoldásnak tűnik.Én valami ilyen megoldásban gondolkoznék:
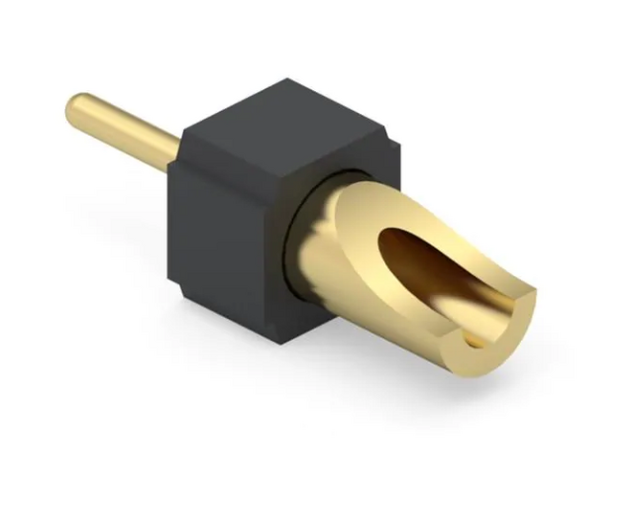
Ez nem túl olcsó alkatrész ahhoz képest, hogy csak egy pin, de fogjuk rá, hogy még éppen belefér. Viszont számomra a műanyag szigetelés is pocséklást jelent, az elhagyásával is nyernék másfél millimétert.
Van valami alternatív javaslatotok? Egyáltalán, mi ebben a helyzetben a bevált megoldás (ha nem oldható módon szeretnék NYÁK-ra forrasztani egy szalagkábelt)?Bug és debug fia vagyok én
-
válasz
 kesztió
#13513
üzenetére
kesztió
#13513
üzenetére
Mi is van pontosan a képen? A forrasztás miért aggályos és miért amatőr?
 Az egyetlen profi megoldás a szalagkábel forrasztása. Ha oldható kötés kell, akkor ott vannak még a jumper kábelek, de az ha lehet még aggályosabb és amatőrebb megoldás az előző kettőnél.
Az egyetlen profi megoldás a szalagkábel forrasztása. Ha oldható kötés kell, akkor ott vannak még a jumper kábelek, de az ha lehet még aggályosabb és amatőrebb megoldás az előző kettőnél. 
[ Szerkesztve ]
-
kesztió
aktív tag
Mondjuk, a szalagkábel pont olyan eszközben lesz, amit ideális esetben egyszer szerelünk és többet el sem mozdítjuk (falba süllyesztett okos termosztát), de ettől még nekem nagyon sérülékenynek tűnik, ha a kábelt sokat mozgatjuk, az előbb vagy utóbb kiszakad a forrasztás helyén. Eltérően a fotón látható jumpertől, amelynél sokkal kisebb mozgási lehetőséget ad a kábelnek. De ha azt mondod, nem fogok hülyeségekkel kínlódni és közvetlenül fogom forrasztani a kábelt.
Ha már itt tartunk, van valami célszerszám a szalagkábel szigetelésének eltávolítására? Vagy egyenként kell lekínlódni őket a végekről forrasztás előtt? Esetleg árulják a kábelt előre pucolva forrasztáshoz?Bug és debug fia vagyok én
-
válasz
kesztió
#13515
üzenetére
Ha biztosra akarsz menni, beforrasztás után nyomj rá egy csík forróragasztót, akkor tuti, hogy nem a forrasztásnál fog eltörni, ha hajlítgatják.
Én egyenként szoktam, ha csak egyet csinálsz, ki lehet bírni... Van olyan kábel, amit le sem kell csupaszítani, mert a páka hőjétől felszalad rajta a szigetelés, ha lusta vagy, ezt is meg lehet próbálni.
Van olyan kábel, amit le sem kell csupaszítani, mert a páka hőjétől felszalad rajta a szigetelés, ha lusta vagy, ezt is meg lehet próbálni.[ Szerkesztve ]
-
#13519
Tankblock
aktív tag
tonermagus
#13511
Tankblock
aktív tag
válasz
tonermagus
#13511
üzenetére
Szia,
a példakóddódban a példányosításkor
IBusnevet adod. szóval csak aIBus.begin(Serial2);fog működni. Sztem a példa kód forrása: [link]Amivel kevered az ennek a GIT reponak egy másik példakódja ha jól sejtem: [link]
Ahol példányosítás így néz ki :IBusBM IBusServo;IBusBM IBusSensor;// iBUS setupIBusServo.begin(Serial1);// commentekIBusSensor.begin(Serial2);Nem csináltam pont ilyet.
Az említett osztály nem Singleton szóval példányosítani kell és begin fnc vel kell beállítani a soros portot, pineket és a fnc maga gondoskodik a timerek használatáról.Szépen a saját loop fnc is hivogatja.... Egy jól megírt libnek tűnik.
Átnéztem a repot, ezek alapján mondom hogy bekötési hiba, vagy tápfesz.
Release the Beast....
-
#13521
tonermagus
aktív tag
Tankblock
#13519
tonermagus
aktív tag
válasz
Tankblock
#13519
üzenetére
Csak hogy értsem is mit miért csinálok: miért van szükség arra a diódára/ellenállásra?
Azt írja, hogy ha csak 1 szenzort használok (mint pl. esetemben az arduino) akkor a diódát lecserélhetem egy 1.2K-s ellenállásra amit a Serial2 TX portjára kell tennem. Ha kihagyom a diódát/ellenállást mi történik? Ha csak a TX-et dugom be nem kellene működnie?
You need to include a diode (such as 1N4148) between the Arduino TX pin and the wire between the iBUS pin and the Arduino RX pin (cathode/solid ring of diode connected at Arduino TX pin) to handle the half-duplex protocol over the single iBUS wire. See example wiring below. If you only have one sensor connected to the iBUS (i.e. only the Arduino board) you can replace the diode with a resistor of 1.2k Ohm. -
#13522
Tankblock
aktív tag
tonermagus
#13521
Tankblock
aktív tag
válasz
tonermagus
#13521
üzenetére
i-BUS mint protokoll ha jól értem akkor egy olyan UART (115200 baud 8N1 )aminek nincs külön Tx meg Rx pinek hanem ugynevezett 1-Wire azaz egy-vezeték konstrukcióban működik.
Jelen esetben a vevő 7 [ms] periódussal küldi az összes csatorna / bejövő vezérlés / PWM jelét ez megy a 17 IO lábra ami Rx.
Amikor a controller szeretné küldeni a sensor adatokat akkor azt a 16 io lábon teszi,
A kettő, hogy ne zavarja egymást ha jól sejtem illik elválasztani, ugye a dióda csak egy irányba vezet. Rx felé érkező jelet választod le a Tx lábról, hogy azt ne süsd meg. Ezt így konyhanyelven leírva - reméelm lesz más aki jobban el tudja magyarázni.Release the Beast....
-
#13523
tonermagus
aktív tag
Tankblock
#13522
tonermagus
aktív tag
válasz
Tankblock
#13522
üzenetére
Teljesen megfelelt. Köszönöm szépen a válaszod!
Más: szeretnék összehozni egy GPS-es távolságmérőt. Ha jól emlékszem Janos250 ennek a nagy tudója...
A tervem az lenne, hogy lenne egy Fix pont, ami gyakorlatilag egy állvány lenne amin egy Arduino + NEO-6M + NRF24L01+PA+LNA kombó lenne. Illetve lenne egy mozgó tárgy, amin szintén az előbbi Arduino + NEO-6M + NRF24L01+PA+LNA kombó lenne. A fix pont beolvassa a GPS koordinátát, azt Nrf24-en továbbküldi a mozgó tárgyhoz, a mozgó tárgy szintén lekéri a saját GPS koordinátáját, majd fogja a két koordinátát és a megfelelő függvénnyel kiszámolja a kettő közötti távolságot és megjeleníti azt egy kijelzőn. Ez lenne az elképzelés
Lehetőleg szeretném elérni az 1-2m-es vagy jobb pontosságot.Viszont megfogalmazódott bennem pár kérdés:
- Melyik modul a legjobb erre a célra? Neo-6m, Neo-8m? Esetleg egy komolyabb, mint pl. ZED-f9p. Ez borzasztó drága lenne, kérdés hogy Neo-6m-el elérhető-e a kívánt pontosság.- A fix pontot azért terveztem bele, mert bízom benne hogy a két GPS ami relatív közel van egymáshoz (max. 200-300m-re egymástól) ha téved is akkor azt egy irányba teszi. Így ha azt használom origónak akkor talán nő a pontosság. Vagy tévedek? Van egyáltalán haszna ennek a fix pontnak?
- Egy Arduino Mega képes arra, hogy megfelelő sebességgel olvassa be a GPS koordinátát és ezután Nrf24-en kiküldje? Vagy lassú lesz? Illetve a kérdésem a másik oldalon is él? Elbírja a Mega hogy fogadja a másik pont GPS koordinátáját, lekéri a sajátját és kiszámolja a távolságot és kiírja egy kijelzőre? Vagy érdemes betenni arra az oldalra egy másik Ardu-t ami végezné a számítást és a kiírást és a két ardu serialon küldené egymásnak az adatot?
- Ezeknek az NRF24L01+PA+LNA-nak mekkora a valóságban a hatótávja? Próbálta már valaki? 1km elvileg a gyári adat, akkor gondolom 500m-et simán bírnia kellene
Bocsi a sok kérdésért
[ Szerkesztve ]
-
#13524
 Gergosz2
veterán
tonermagus
#13523
Gergosz2
veterán
tonermagus
#13523
Gergosz2
veterán
válasz
tonermagus
#13523
üzenetére
Fix pontra minek GPS meg RF adó? Nem elég lenne elég csak a koordinátája?
Ezeknek az NRF24L01+PA+LNA-nak mekkora a valóságban a hatótávja? Próbálta már valaki? 1km elvileg a gyári adat, akkor gondolom 500m-et simán bírnia kellene.
Papíron, nyílt terepen talán. Valóságban szerintem olyan 200m az említett antennával, beltérben meg max 1 fal.Nokia 6030 Hardcore User // I Panic Restaurant by Taito
-
válasz
 Gergosz2
#13524
üzenetére
Gergosz2
#13524
üzenetére
"Fix pontra minek GPS meg RF adó? Nem elég lenne elég csak a koordinátája? "
Korábban volt róla szó, hogy egy GPS vevő önmagában elég pontatlan, de két egyforma GPS vevő egymáshoz közel nagy valószínűséggel ugyanabba az irányba és ugyanannyit téved, ezért egymáshoz viszonyítva nagyon pontosan lehet velük távolságot mérni.
Illetve ha az egyik vevőnek ismert az abszolút pozíciója, akkor a mért és a valós helyzet közti különbséget levonva a 2. GPS vevő által mért pozícióból, szintén elég pontos helyadatot lehet nyerni.[ Szerkesztve ]
-
#13526
 Janos250
őstag
tonermagus
#13523
Janos250
őstag
tonermagus
#13523
Janos250
őstag
válasz
tonermagus
#13523
üzenetére
Hosszú, ha nem érdekel a GPS, ugorj!
Egy részére tudok válaszolni, egy részére nem.
Hogy mekkora a hiba, ha két egyforma GPS, két egyforma antennával mér, azt én is csak irodalomból ismerem, hogy - elvileg - deciméteres pontosság, azaz 1 m-em belüli, de akár 10 cm-es is lehet. NRF24L01-et nem ismerem, de valaki innen bizonyára. A Neo-6m-re csak tippem van, hogy valószínűleg elég.
A ZED-f9p már biztosan, mert abból egy páros pár centis pontosságot biztosít. Én NS-HP-t használok, de annak darabja a hozzá való antennával, szállítással 200$/db. (+VÁM+ÁFA+macera)
Ezt ismerem, ez elvileg +- 1 cm pontosságot ad, de a gyakorlatban is közel annyi, 5 cm-nél nagyobbat még soha nem mértem.
A Neo M6, M8 számára gyakorlatilag bármilyen antenna jó, de az F9-hez, és az én csipemhez spéci, két frekvenciát tudó ("L1 + L2") antenna kell. Ezeknél gyakorlatilag két különböző frekihez tartozó antenna van valahogy egymásra építve. Az M8 is tudja a GPS+Glonass+Galileo+Beidou műholdakat egyaránt venni. Fontos, hogy olyan csip legyen, ami mind a négy típust tudja. Az indiai és a japán nem érdekes számunkra. A mindkét sávot is tudó, a ZED is.
A leírás szerint a 8M önmagában is tudja a dm-es pontosságot, egy vevő esetén is.Egy kis fejtágító:
Egy normál GPS vevő nagyjából néhány méter pontosságot tud.
Növelhető a pontosság olyan vevővel, ami a műholdak által sugárzott hibajelet is fel tudja dolgozni, ezzel dm-es pontosság érhető el. Azt hiszem, az 8M ilyen.
Amatőrök csinálják néha, hogy két olcsó vevőt telepítenek, egyet fix pontra ("bázis"), másikat ("rover") meg a kívánt helyre, és a roverhez küldik a bázis által mért HIBÁT. Ez deciméteres hibát szokott eredményezni, de néha elég pontos is lehet. (nem használtam, csak irodalom). Ehhez nem kell nagy sávszélesség, mert csak a hibát kell küldeni. Ide bármilyen Arduino, és majdnem bármilyen rádiós csip megfelel. A célszerű gyakoriság: másodpercenként.
Profi módszer: pl. a ZED, valamint amit én használok, és még néhány.
Ekkor a bázis nem a hibát küldi el a rovernek, hanem minden egyes műholdra külön-külön a mért adatokat, amit a rover fel tud használni ("RTK") . Ez már néhány cm-es pontosságot biztosít. Ha nem tudja mindkét (L1+L2) sávot, akkor kissé pontatlanabb, ha igen, akkor pontosabb. Ezekből a legolcsóbb is százdollároknál kezdődik, de vannak többezresek is.
Antennák:
Ha csak az egyik sávot használja a vevő, akkor nálam az 5 $-os kínai antenna ugyanazt produkálta, mint a 100 $ feletti "nyugati".
Kétsávosból nincs olcsó. A beépíthető kb. 40 $, a tokozott 50 $-tól a csillagos ég.
Adat továbbítása, és Arduino.
Szerintem van aki kitalálja, hogy én ESP32-t használok. Bázis a fix ponton: A GPS-t olvassa soroson [nem, nem az, ez kisbetűs! ].
Ezt WiFin küldi a routernek. A routeren port forward beállítva, hogy kinnről is elérhető legyen az ESP32 szerver.
Rover: hasonló mint a bázis, de itt egy telefon megosztott net elérését használja az ESP32, WiFin csatlakozva a telefonhoz.
Ha jól van megírva a szoftver, akkor bírja a sebességet. Mivel az ESP32 2 magos, van amit áttettem a 0-ás magra, alacsony prioritással.
Alapállapotban a loop az 1-es magra kerül, mert a 0-on van a WiFi, meg ilyesmi.
Hosszú lett, és csak részben Arduino, de ha a modi úgy látja, majd átteszi offba.Az amerikaiak $ milliókért fejlesztettek golyóstollat űrbéli használatra. Az oroszok ceruzát használnak. Én meg arduinot.
-
Janos250
őstag
válasz
Gergosz2
#13524
üzenetére
Ha nem kell túl nagy pontosság, és a vevő fel tudja használni a holdak által küldött hibát, akkor elég.
Meg lehetne spórolni az RTK módszerrel is az egyik vevőt, ha az országosan "elérhető" netes adatokat használjuk, de az részben nagyon drága, részben meg nekem valahogy nem sikerült.Az amerikaiak $ milliókért fejlesztettek golyóstollat űrbéli használatra. Az oroszok ceruzát használnak. Én meg arduinot.
-
#13528
Janos250
őstag
tonermagus
#13523
Janos250
őstag
válasz
tonermagus
#13523
üzenetére
Ha egyszer lesz időm, kipróbálom két olcsó GPS csippel, mekkora lesz a hiba. Ha Te előbb próbálod ki, kíváncsi vagyok az eredményre!
Az amerikaiak $ milliókért fejlesztettek golyóstollat űrbéli használatra. Az oroszok ceruzát használnak. Én meg arduinot.
-
#13529
tonermagus
aktív tag
Janos250
#13528
tonermagus
aktív tag
válasz
 Janos250
#13528
üzenetére
Janos250
#13528
üzenetére
Wow, tudtam én hogy te vagy itt a GPS mester
Nagyon szépen köszönöm az elég hasznosnak bizonyult írásod!
A leírás szerint a 8M önmagában is tudja a dm-es pontosságot, egy vevő esetén is.
- Hát ennek szívből örülnék. Viszont pont nemrég raktam össze az Ardu+Neo M8N párost és sajnos 10-20 métert sétál. Régebben is hasonló volt az eredmény, akkor TinyGPS++-t használtam, most átálltam NEOGps-re de nem javult a dolog. Bár hozzáteszem én házak között városban, az erkélyről próbálgatom. Elképzelhető hogy ezért a nagy pontatlanság? Élesben persze nyílt-sík terepen lenne használva.
Növelhető a pontosság olyan vevővel, ami a műholdak által sugárzott hibajelet is fel tudja dolgozni, ezzel dm-es pontosság érhető el. Azt hiszem, az 8M ilyen.
Ezt nem tudom elképzelni. Hogyan tudom ezt a hibát kiszámolni? És a Rover oldalon mit kezdek ezzel a hibával? Ez a hiba egy gps koordináta vagy távolság? Ez a hibajel feldolgozás hogy működik? Van erre valami függvény, funkció, parancs? Akkor az nem megoldás, hogy a "bázis" által lekért GPS koordinátát és a "rover" koordináta közötti távolságot számoltatom? Azt szeretném hogy a "bázistól" mindig ugyan olyan, vagy lehetőleg 1 méteren belüli távolságra álljon meg a "Rover"
Ha egyszer lesz időm, kipróbálom két olcsó GPS csippel, mekkora lesz a hiba. Ha Te előbb próbálod ki, kíváncsi vagyok az eredményre!
Hát ha megteszed akkor azt megköszönném! Elvileg pár napon belül lehet nekem is sikerülne összeállítani a bázis állomást, és a kettő közötti kommunikációt, de az nem biztos hogy olyan pontos mint a te mérésed Pontosságról: ahogy olvastam az Ardu platform miatt, illetve a 32bit miatt alapból nem pontos a koordináta amit megkapunk. Ez nálad nem zavar be? Vagy ez jelentéktelen? -
#13530
Aryes
nagyúr
tonermagus
#13529
válasz
tonermagus
#13529
üzenetére
"házak között városban, az erkélyről próbálgatom. Elképzelhető hogy ezért a nagy pontatlanság?"
Biztos! Eleve nem lát rá minden műholdra, és házak közti visszaverődések emiatt könnyebben összezavarják a rendszert (ugyanazt a jelet többször is megkapja a vevő), sőt, van, hogy az eredeti jel nem is jut el a vevőig, csak a visszavert, így hibás lesz a számítás. Ilyenkor egy ház előtt guruló autó is hibát tud okozni.
-
-
#13533
 zsolti_20
senior tag
tonermagus
#13523
zsolti_20
senior tag
tonermagus
#13523
zsolti_20
senior tag
válasz
tonermagus
#13523
üzenetére
Üdv emberek! A sima NRF24L01+PA+LNA modul felejtős, ha csak nem szeretnéd gány módjára alufóliába tekerni a zaj miatt. Két éve kísérletezek ezekkel a modulokkal, a legmegbízhatóbb verziója az "AS01-ML01DP5" ami így néz ki:
[link]
A többivel csak a szívás van. Annyi hogy egy 16v 100uf elektrolit kondenzátor kell a pozitív és negatívhoz. Tiszta terepen tud kb 700m teszt alapján, Árnyékos helyen 150m kb, de attól is függ hogy mi van közte. Elvileg tantalum kondenzátorral még ennél is jobb a jel, de nem volt még időm végig tesztelni milyen értékkel a legjobb.
Szigorúan 3.3v-ot kell kapnia, max fogyasztása papíron 250mah. A fogyasztás és a jelerősség szoftveresen állítható az alábbi sorokkal:
RF24_PA_MIN
RF24_PA_LOW
RF24_PA_HIGH
RF24_PA_MAXHa a jel nem elég erős könnyen építhető neki egy jelismétlő így a jel kilőhető akár a holdig is. Ebben szívesen tudok segíteni
Elég érzékeny a tápra így törekedni kell rá hogy a legtisztább forrást kapja. Az alábbi módszerrel oldottam meg:
3.7v 18650 akkumulátor feszültséget feltornáztam 5v volt ra egy DC-DC konverterrel majd azt 3.3v-ra egy buck converterrel. A Fix 5v megy az arduinohoz is. A 3.3v-hoz egy elektrolit kondenzátor beraktam így stabil feszt tud kapni. Kapható hozzá egy külön modul is, de sok helyet foglalt, így tesztelni sem teszteltem.
Bármi kérdés van a modullal kapcsolatban csak kérdezzetek.
-
#13534
tonermagus
aktív tag
zsolti_20
#13533
-
#13535
zsolti_20
senior tag
tonermagus
#13534
zsolti_20
senior tag
válasz
tonermagus
#13534
üzenetére
Megoldható ekkora távra a sima csak akkor akkor be kell csomagolni mint egy szendvicset:
[link]
AS01-ML01DP5 előre le van burkolva, kisebb helyet is foglal és stabilabb volt vele az összes projektem. Attól függ mennyire számít neked a minőség, vagy csak jóvan az úgy, úgysem látszik alapján megy. -
#13536
tonermagus
aktív tag
zsolti_20
#13535
-
#13537
zsolti_20
senior tag
tonermagus
#13536
zsolti_20
senior tag
válasz
tonermagus
#13536
üzenetére
Volt hogy nekem kb 15cm távolságból sem akart működni amíg nem burkoltam így be. Ha meg is kapta a jelet akkor csak valami zavaros jelet. Körülötte elég sok minden be tud zavarni én úgy vettem észre. Én úgy szoktam tesztelni, hogy 1 karaktert küldök át, van amikor teljesen más érkezik meg. Így részemről használhatatlan. Gondolom a Te esetedben sem mindegy hogy "64"-et kapsz vagy mondjuk "GA"-t.

3.3v-ról még soha nem próbáltam. Nem volt rá valamiért szükségem. Részemről nehezebb is találni mint 5v-os forrást. -
-
#13539
Janos250
őstag
tonermagus
#13529
Janos250
őstag
válasz
tonermagus
#13529
üzenetére
"Pontosságról: ahogy olvastam az Ardu platform miatt, illetve a 32bit miatt alapból nem pontos a koordináta amit megkapunk. Ez nálad nem zavar be? Vagy ez jelentéktelen?"
Ezt nem tudom, hogy értette, aki ezt írta, mert a koordinátákat maga a GPS chip számolja, és soros vonalon ASC karakterekkel (vagy binárisan, mint pl. nálam) küldi a kész eredményt.
Vagyis az Arduino semmit nem számol.Az amerikaiak $ milliókért fejlesztettek golyóstollat űrbéli használatra. Az oroszok ceruzát használnak. Én meg arduinot.
-
#13540
tonermagus
aktív tag
Janos250
#13539
tonermagus
aktív tag
válasz
Janos250
#13539
üzenetére
Szerintem arra gondolhatott, hogy egy gps koordináta így néz ki:
11 . 22 33 44 5
Viszont az Arduinon ha dolgozni akarsz azzal a koordinátával (kiiratni, átküldeni RF-en, stb...) az utolsó számjegy elveszik és ez lesz belőle:
11. 22 33 44
Fogalmam sincs hogy ez az utolsó számjegy mennyire fontos -
#13541
 gyapo11
őstag
tonermagus
#13540
gyapo11
őstag
tonermagus
#13540
gyapo11
őstag
válasz
tonermagus
#13540
üzenetére
Fogalmam sincs hogy ez az utolsó számjegy mennyire fontos
Attól függ a Föld melyik pontjáról van szó. Ha Magyarországot nézzük, akkor észak-dél irányban kb. 110 km egy fok, tehát a hetedik tizedesjegy 11 cm eltérés, kelet-nyugati irányban kb 78 km egy fok, ott 7.8 cm.
menyország -> mennyország, akadáj -> akadály, jótálás -> jótállás, Iphoneal > Iphone-nal, kisuly > kisujj, csővet > csövet
-
#13543
gyapo11
őstag
tonermagus
#13542
gyapo11
őstag
válasz
tonermagus
#13542
üzenetére
És ez a maximális eltérés a 0 és a 9 között, egy egységnyi eltérés ennek a tizede, tehát a hetedik tizedesjegy az mm-es nagyságrend.
menyország -> mennyország, akadáj -> akadály, jótálás -> jótállás, Iphoneal > Iphone-nal, kisuly > kisujj, csővet > csövet
-
#13544
tonermagus
aktív tag
tonermagus
aktív tag
Ma egész szépen elhaladtam a GPS projektemmel. Felépítettem a Bázis állomást, NEO GPS 8 leszedi a GPS koordinátát, azt eltárolom egy floatban amit átküldök NRF24L01+PA+LNA-val a Rover eszköznek.
float gpsadat=fix_data.latitude();float gpsadat1=fix_data.longitude();radio.write(&gpsadat, sizeof(gpsadat));radio.write(&gpsadat1, sizeof(gpsadat1));Tudom, ez nem túl elegáns, tömbként jobb lenne átküldeni, de még nem jöttem rá hogy kell lekódolni
Na mindegy, a lényeg az, hogy ez meg is érkezik a Rover-hez, mindkét érték tökéletesen megjelenik Seriallal kiíratva a gpsadat és gpsadat1-et.A gond ott kezdődik, hogy ugyebár két dinamikusan változó GPS koordináta között akarok távolságot mérni. Így az alábbi parancsot használom:
NeoGPS::Location_t base( gpsadat, gpsadat1 );float range = fix.location.DistanceKm(base);Ez tökéletesen működik ha fix számot írok be a :
NeoGPS::Location_t base( 43.121212, 20.121212 );float range = fix.location.DistanceKm(base);De ha oda a gpsadat, gpsadat1 -t használom akkor nagyon hülye adatok jönnek ki.
Hosszas nyomozás után rájöttem, hogy a Location_t elvileg int32_t változót vár paraméternek, én pedig ugye float-ot adok. Így a gyakorlatban ezt kapja:NeoGPS::Location_t base( 43, 20 );Hogy tudom azt megcsinálni, hogy a 43.121212-ból 43121212 legyen? Mert úgy is elfogadja. Tudom hogy nagyon alap dolog, de rajtam kifog
Próbálkoztam az
int32_t gpslat=gpsadatsorral is, de ekkor is csak 43 tárolódik el a gpslat változóban...Egyébként könnyen lehet hogy már a gps koordináták kiolvasásánál lehetne ilyen formátumra kérni az adatot, de ebben János250 kolléga lehet jobban képben van
[ Szerkesztve ]
-
#13545
Tankblock
aktív tag
tonermagus
#13544
Tankblock
aktív tag
válasz
tonermagus
#13544
üzenetére
Szia,
C++ is your best friend...
Feltételezésem szerint ezt a könyvtárat használod : [link]
static float DistanceKm( const Location_t & p1, const Location_t & p2 ){return DistanceRadians( p1, p2 ) * EARTH_RADIUS_KM;}
ahol a bemenet egy class ami jó hír mert van float initje isLocation_t( float lat, float lon ): _lat(lat / LOC_SCALE), _lon(lon / LOC_SCALE){}Szóval a kapott értékkekel készíts 2 Location_t classt majd hívd meg a függvényedet.
Lassan jár a sör és átmehetünk a programozzunk topicba :-P
Release the Beast....
-
Tankblock
aktív tag
válasz
 Yodafon
#13546
üzenetére
Yodafon
#13546
üzenetére
Szia
Az Arduino Nano egy Atmel 328P és nincs benne Bluetooth.
Lehet hozzá tenni, de nem ajánlom. Nordic chipjei között nézelődj ha mindenképpen bluetooth kell.
ESP32 is képes Bluetoothra, itt a fogyasztása lesz nagyobb.Van még más szabvány is..
Azt még gondold meg Mit szeretnél, pl SONOFF árul Wifi alapú kapcsolókat is....
Szóval project függő, hogy lehet megéri 11k per unit....Release the Beast....
-

Yodafon
senior tag
válasz
Tankblock
#13547
üzenetére
Ez se tud akkor bluetooth-t?
https://store.arduino.cc/arduino-nano-33-ble-senseA célom
az hogy jó legyek, hű társak oldalánegy arcfelismerő ami kamera alapján megnézi hogy nyitott vagy csukott a szeme az illetőnek és az alapján kapcsol egy lámpát.
A linkelt hivatalos cucc pont jó lenne mert
1. kicsi
2. van benne BLE
3. van hozzá TinyML machine learning okosság
Miért nem ajánlott a Bluetooth Arduino-ra?
Wi-Fi-t nem preferálom mert kis fogyasztás lenne a cél + ágyúval verébre effektus lenneI'm gangsta!
-
#13549
Aryes
nagyúr
tonermagus
#13544
válasz
tonermagus
#13544
üzenetére
"Hogy tudom azt megcsinálni, hogy a 43.121212-ból 43121212 legyen? "
Rohadt egyszerű:43.121212*1000000= 43121212




















 Az egyetlen profi megoldás a szalagkábel forrasztása. Ha oldható kötés kell, akkor ott vannak még a jumper kábelek, de az ha lehet még aggályosabb és amatőrebb megoldás az előző kettőnél.
Az egyetlen profi megoldás a szalagkábel forrasztása. Ha oldható kötés kell, akkor ott vannak még a jumper kábelek, de az ha lehet még aggályosabb és amatőrebb megoldás az előző kettőnél. 
 Van olyan kábel, amit le sem kell csupaszítani, mert a páka hőjétől felszalad rajta a szigetelés, ha lusta vagy, ezt is meg lehet próbálni.
Van olyan kábel, amit le sem kell csupaszítani, mert a páka hőjétől felszalad rajta a szigetelés, ha lusta vagy, ezt is meg lehet próbálni.








Új hozzászólás Aktív témák
 ekkold
ekkold- Autós topik látogatók beszélgetős, offolós topikja
- Samsung Galaxy S23 és S23+ - ami belül van, az számít igazán
- Kerékpárosok, bringások ide!
- BestBuy topik
- Politika
- iPhone topik
- Bluetooth hangszórók
- Külföldi rendelések: boltok, fizetés, postázás
- Modding és elektronikai kérdések
- Intel Core i5 / i7 / i9 "Alder Lake-Raptor Lake/Refresh" (LGA1700)
- További aktív témák...

- AKCIÓ! Intel Core i7 FÉLKONFIGOK - KÉRHETŐ ALKATRÉSZ IS CPU, RAM, ALAPLAP
- iPad Air 5 64GB M1 WIFI (kék)
- iPhone 14 Pro Max 128gb, makulátlan,garanciális, független
- ASUS H97-PRO alaplap 1150 Intel H97 lapkakészlet, 4xDDR3, SATA 3.0, HDMI, M.2 SSD foglalat
- Macbook Pro 16.2" M1 PRO 10C/16C 16GB - 1TB Magyar billentyűzet - Garanciális 2025.08.04.-ig
Állásajánlatok

Cég: Alpha Laptopszerviz Kft.
Város: Pécs

Cég: Ozeki Kft.
Város: Debrecen