- AMD K6-III, és minden ami RETRO - Oldschool tuning
- Milyen SSD-t vegyek?
- ThinkPad (NEM IdeaPad)
- Milyen egeret válasszak?
- Intel Core i5 / i7 / i9 "Alder Lake-Raptor Lake/Refresh" (LGA1700)
- Multimédiás / PC-s hangfalszettek (2.0, 2.1, 5.1)
- Realme Pad – vissza az iskolapadba
- Intel Core i3 / i5 / i7 8xxx "Coffee Lake" és i5 / i7 / i9 9xxx “Coffee Lake Refresh” (LGA1151)
- Milyen videókártyát?
- Apple notebookok
Hirdetés
-


Duotts F26 - megoldjuk erőből
ma 1500 watt összeteljesítményű biciklit kaptunk tesztre, amely a legalitás összes határán túl van, kontrollálni nem könnyű, de néha óriási élmény is.
-


Az Intel a legmodernebb chipgyártó géppel előzheti meg az egész szektort
it Az Intel lett az első cég, amely szolgálatba állította az ASML új High NA EUV litográfiás chipgyártó eszközeit, ezzel minden riválisát megelőzheti.
-

The Witcher - Jön az 5. évad, ezzel együtt pedig elkaszálták a sorozatot
gp A negyedik szezon forgatása a napokban kezdődött el, kíváncsian várjuk mikor láthatjuk a végeredményt.






Új hozzászólás Aktív témák
-

csibész35
tag
Sziasztok!
Ebben a témakörben jelen pillanatban nincs aktív magyar fórum, bizonyára vannak akik tanácstalanok a témában, vagy egyszerűen csak kíváncsiak, hogy is működik egy ilyen szerkezet.
Itt remélhetőleg kivesézünk mindent amit a motoros kamera stabilizálás nyújt.
Úgy, mint az akciókamerákhoz gyártottól, a több kilós filmes kamerákhoz használatosig; házi barkácstól a kínai megoldásokon át, a gyári kivitelezésűekig; földi, -illetve légi felvételekhez kialakítottig egyaránt!
Ezen felül a hozzájuk tartozó motorok, vezérlők, szenzorok, enkóderek, keretek (vázak), hardveres és szoftveres beállításaik, kiegészítők, tartozékok színes skáláját.Kellemes időtöltést
-

.DLL
veterán
Kedvcsinálónak és érdekességnek álljon itt egyből a legnagyobb egyedi készítésű, Alexmos vezérlős gimbal amit eddig láttam.

https://www.youtube.com/watch?v=JQ1F429s_UoElég egyedi megoldás, hogy a "Roll axis"-nak nincs igazi tengelye, gyakorlatilag egy hajlított slider, és az ív középpontjába kell beállítani a kamerát.

(P.H.)
-

bubi92
őstag
már egy ideje gondolkodok rajta, hogy neki állok építeni egyet. nem is feltétlen a saját használat lenne a cél, inkább, hogy valamivel mókoljak.
egy körülbelüli számítás alapján úgy néztem, hogy max 150 ezer alatt megtud állni a dolog, ha az ember magának csinálja.
te mennyire jöttél ki? -
csibész35
tag
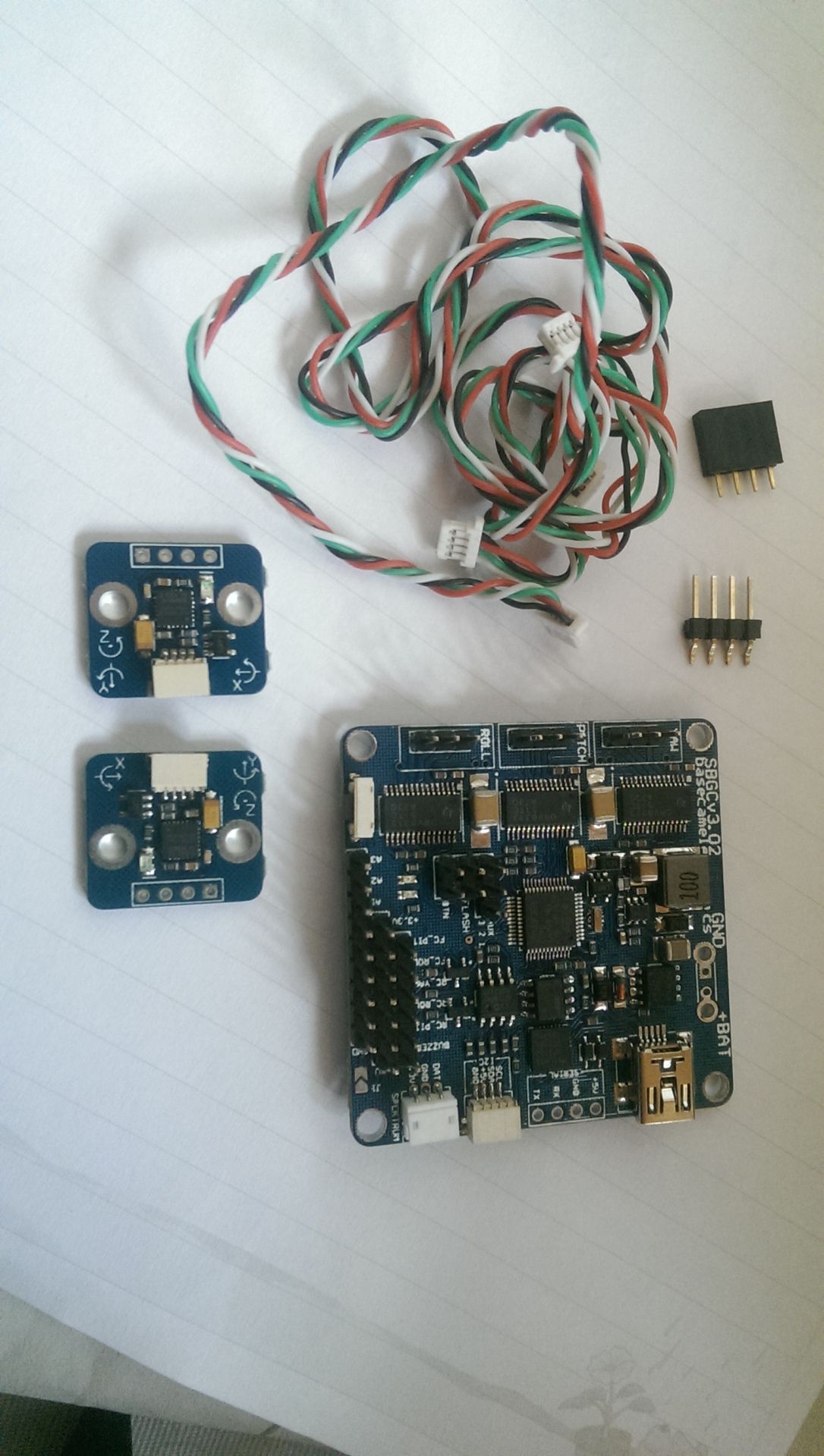
Leginkább ebay-ről. Vannak jó alapok is, pl. csak a szénszálas váz. Mindent külön-külön is meg lehet venni, át kell nyálazni, hogy jössz ki jobban ill. milyet szeretnél összeállítani. Ha nem ragaszkodsz a szénszálhoz, aluból is össze lehet rakni. Minimálisan lesz nehezebb cserébe jóval olcsóbb.
-
csibész35
tag
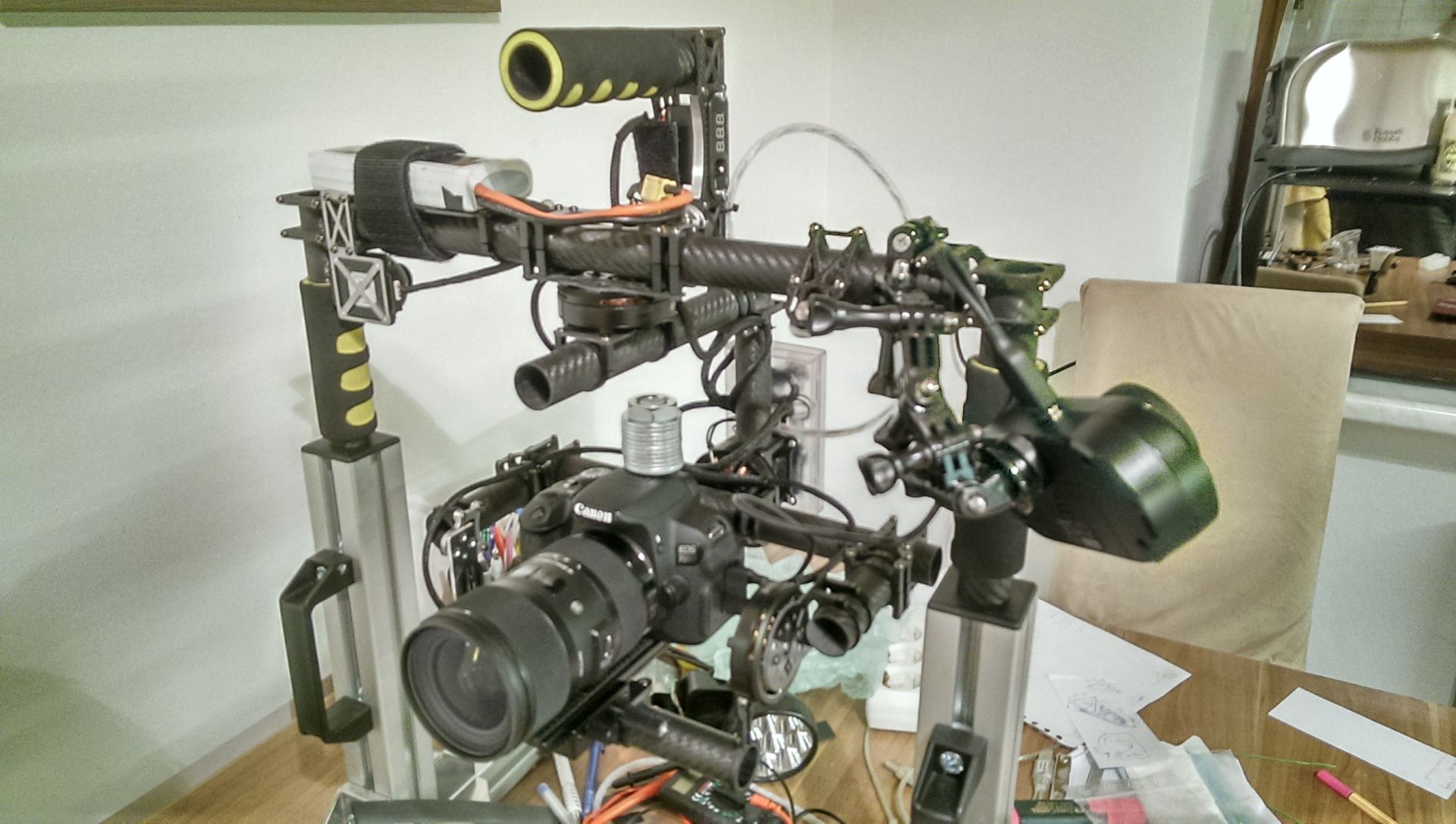
Leírom honnan indult, hol tart és mik a további fejlesztések a sajátommal kapcsolatban. (hátha érdekel valakit
 )
)A vásárolt állapot, 8bit, rc gázkaros pitch mozgató, ill. egy rc távirányító, amivel a svenkelést lehetett megoldani. 2db 3s lipo akksi, amiből az egyik kuka. Az állványt már én építettem hozzá.


-
csibész35
tag
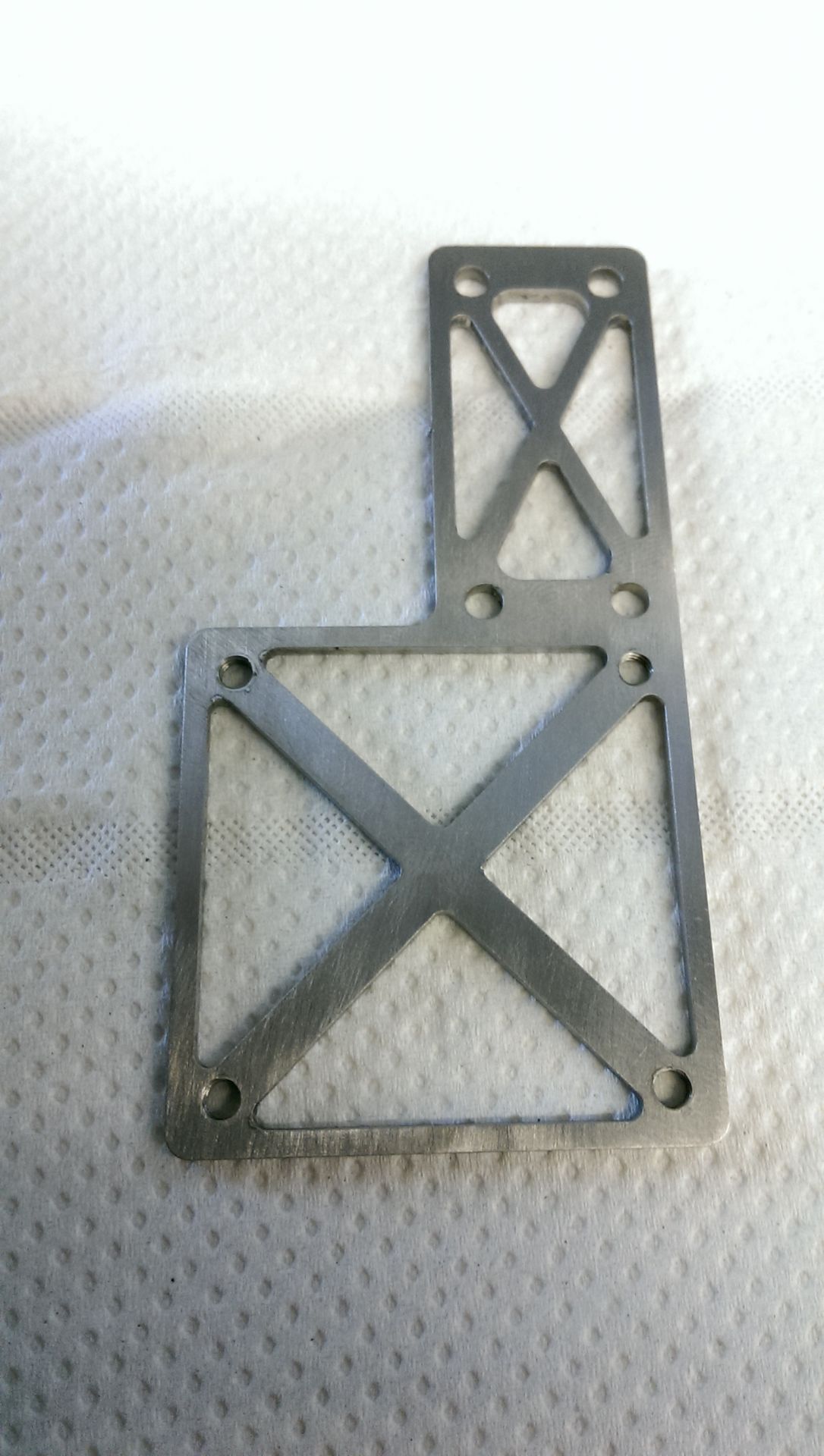
A joystick kapott egy lézervágott konzolt, hogy jobban kézre (ujjra) álljon. Megjött az usb-s fókuszállító és az új obi is. Előbbit ideiglenesen a Gopro rögzítőivel szereltem fel, utóbbi pedig nehéz, mint a sár. Emiatt nem tudtam eléggé hátratolni a kamerát, hogy meglegyen a súlypont, így lesúlyoztam a vakupapucsnál amíg megjönnek a karbon csövek, hogy meg tudjam hosszabbítani a karjait.





-
csibész35
tag
El is érkeztünk a jelenbe, megérkeztek az enkóderek, cserébe a roll motorom beadta a kulcsot. Már a fix rész (vasmag és a tekercsek) is mozgóvá avanzsált. Remélem meg tudom javítani. Az enkóderek beépítéséhez szinte teljesen szét kell borítsam az egészet és sok mindent át is kell szabnom. Ezzel egybekötve a vezetékelést is megpróbálom valennyire eldugni. Folyt köv.


-
.DLL
veterán
válasz
 csibész35
#12
üzenetére
csibész35
#12
üzenetére
Karácsonyfa már nem is kell, annyi minden van ezen.

De hogy érted, hogy a Lilliput monitor csak 1 napot bírt?A roll motornak pedig szerintem amúgy is nagy így a terhelése, minen ami előtte van azon a kis 5mm-es tengelyen "lóg". Drónon láttam már olyat, hogy a motor tengelye tört el mint a ropi...
(P.H.)
-
csibész35
tag
Papírforma szerint bírnia kell. Ez az enkóderezés az utolsó utáni esély, hogy lecseréljem a motorokat, szóval már lelkileg készülök rá
A Lilliput megjött, próbálgattam, faxa! (persze, hogy addig nézegettem amíg csak kimaradt, hogy peakinges legyen
) Kb. 20-30%-ra merítettem, kikapcsoltam, elraktam másnapra. Másnap már nem kapcsolt be. Feltettem tölteni, bekapcsolt képernyő mellett töltött, holott a kapcsoló off volt. Nagynehezen feltöltött, lehúztam a töltőt és soha többet nem kapcsolt ki. Lemerült, utána már tölteni se tudtam. Plusz az állapotjelző led se működött.
Nagyot csalódtam bennük, az egész cucc olcsó bóvlinak tűnik, a márkajelzés csak a dobozon és a monitoron van rajta. Mintha csak egy utánzat lenne. A napellenző egy hulladék tépőzáras valami, nem is passzol rendesen. A support meg egyenesen 0. Ja és még a címemet is elírták, ha nem veszem észre, a mai napig nem kapom kézhez.
lilliputdirect.com -
.DLL
veterán
válasz
csibész35
#15
üzenetére
Hát durva... gondolom visszaküldted, visszautalták a pénzt?
Szerintem egy ilyen gimbal-ra egy erősebb okostelefon is elég lenne kijelzőnek DSLR Controller appal. Peaking-et, histogram-ot is tud, kisebb, könnyebb megoldás, szerintem.Amúgy érzésre milyenek ezek a carbon csövek az aluhoz képest, melyik a merevebb (hasonló méretek mellett)?
(P.H.)
-
csibész35
tag
Igen visszaküldtem, már 2+ hete ülnek rajta. Semmi reakciójuk nem volt eddig. Pár napja írtam egy mailt, tegnap válaszoltak, hogy az új alaplapot várják...
Ó de jó is lenne, ha egy tablet vagy bármi hasonló rendelkezne HDMI IN-el
Az 1mm falvastagságú karbon csövek is durván masszívak! A 400mm hosszúakat próbáltam hajlítgatni -úgy izomból- semmi!
+1 az usb-s fókuszállító, plusz a hdmi-re kiküldött jel az ml peakingjével meglehetősen belassította a gépet (700D). 1-2mp-el csúszott minden fókusz
Persze most a leggyengébb láncszem a gép[ Szerkesztve ]
-
.DLL
veterán
válasz
csibész35
#17
üzenetére
Ja tényleg neked USB-n lóg a fókuszvezérlő kiegészítő, úgy nem tudod a mobilt a gére kötni USB-vel. Mert hogy így működik ez a DSLR Contoller app, USB kábelen megkapja a képet a divájsz a fényképezőgépből, lehet az mobil, vagy épp tablet: https://www.youtube.com/watch?v=VW-PhYB3zfE&t=18m57s
Így nem kell a gépet sem túlterhelni ML-el.Izomból nehéz megítélni, a 20x20-as, de még a 15x15-ös Alu zártszelvény is masszív. De ha a két vége van csak alátámasztva, és a közepénél rátehénkedve érezni, hogy mennyire hajlik. De ha csak 40cm-nél támasztom alá, akkor a 20mm-re rá is állhatok.
Viszont az már nem pehelykönnyű kategória, mint a karbonok. :\(P.H.)
-
csibész35
tag
Igen, bocs! Azt kifelejtettem, hogy az usb foglalt. Ismerem ezt az alkalmazást, tényleg jó.
Ahogy említetted is, a gyenge pontok valóban a motoroknál vannak. Az, hogy alu vagy szénszál, inkábba súly miatt számít (valamennyit) és nem a merevség miatt. Szerintem kb. 2kg-os kameráig nincs számottevő külömbség.
-
csibész35
tag
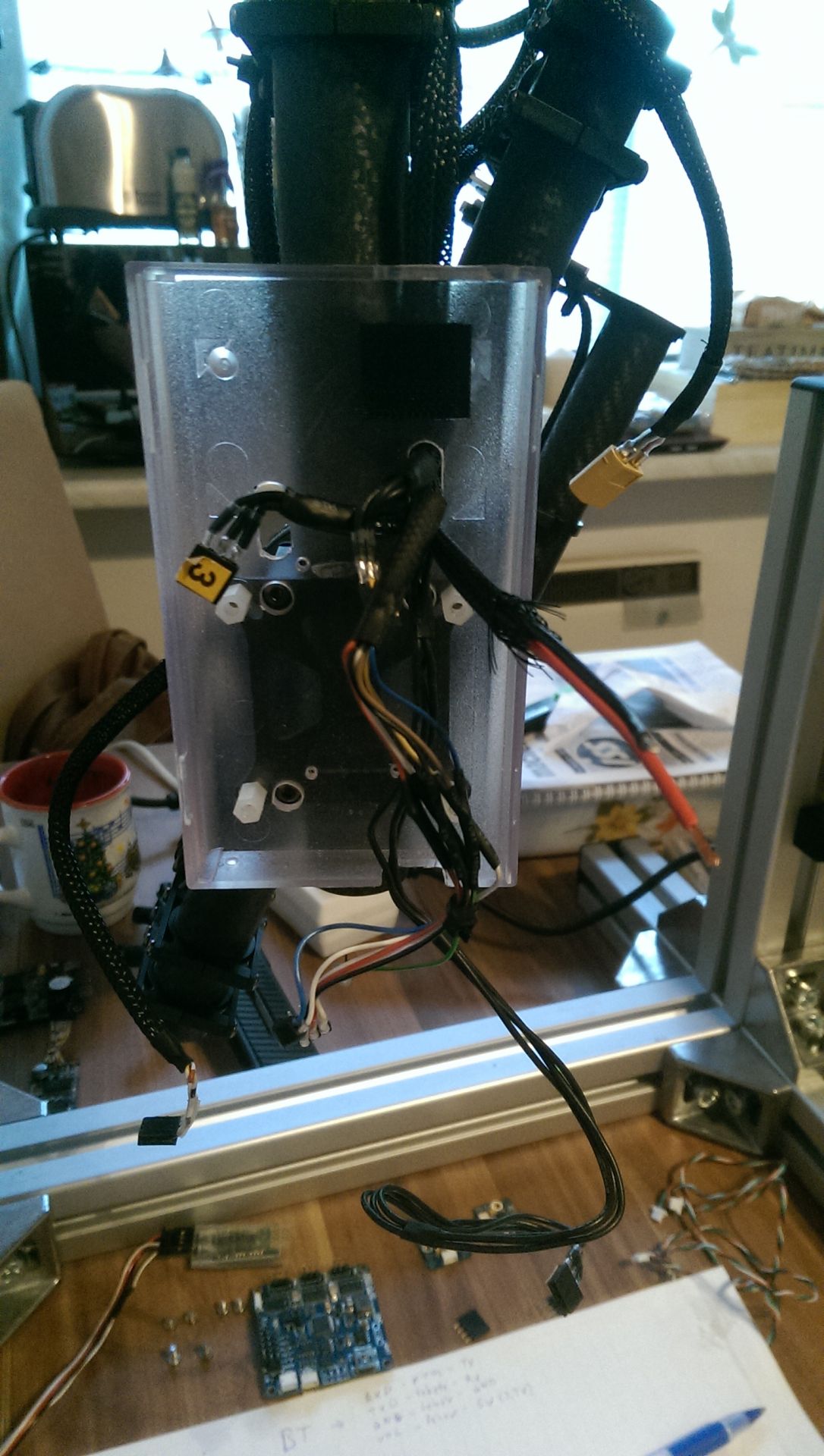
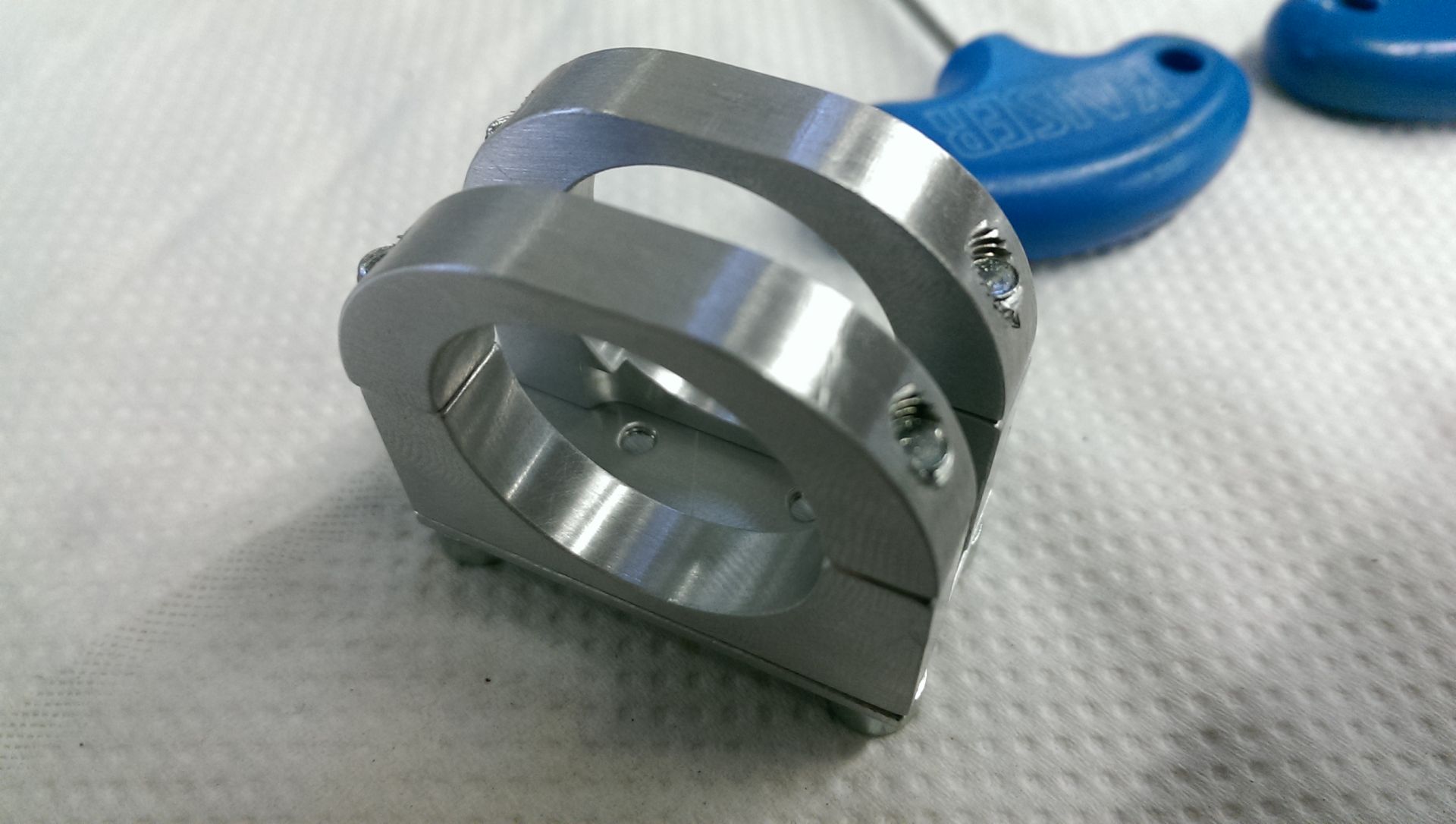
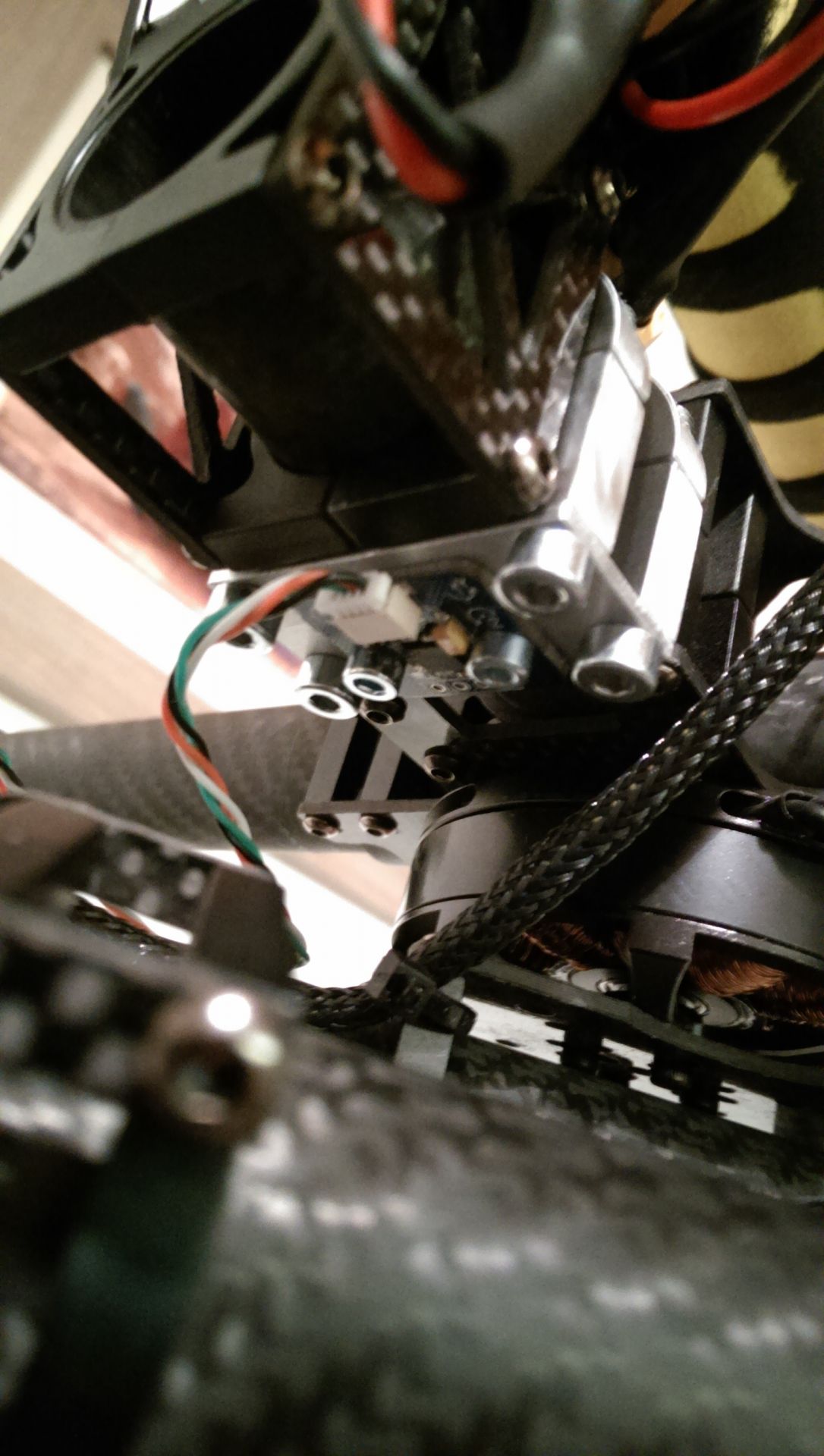
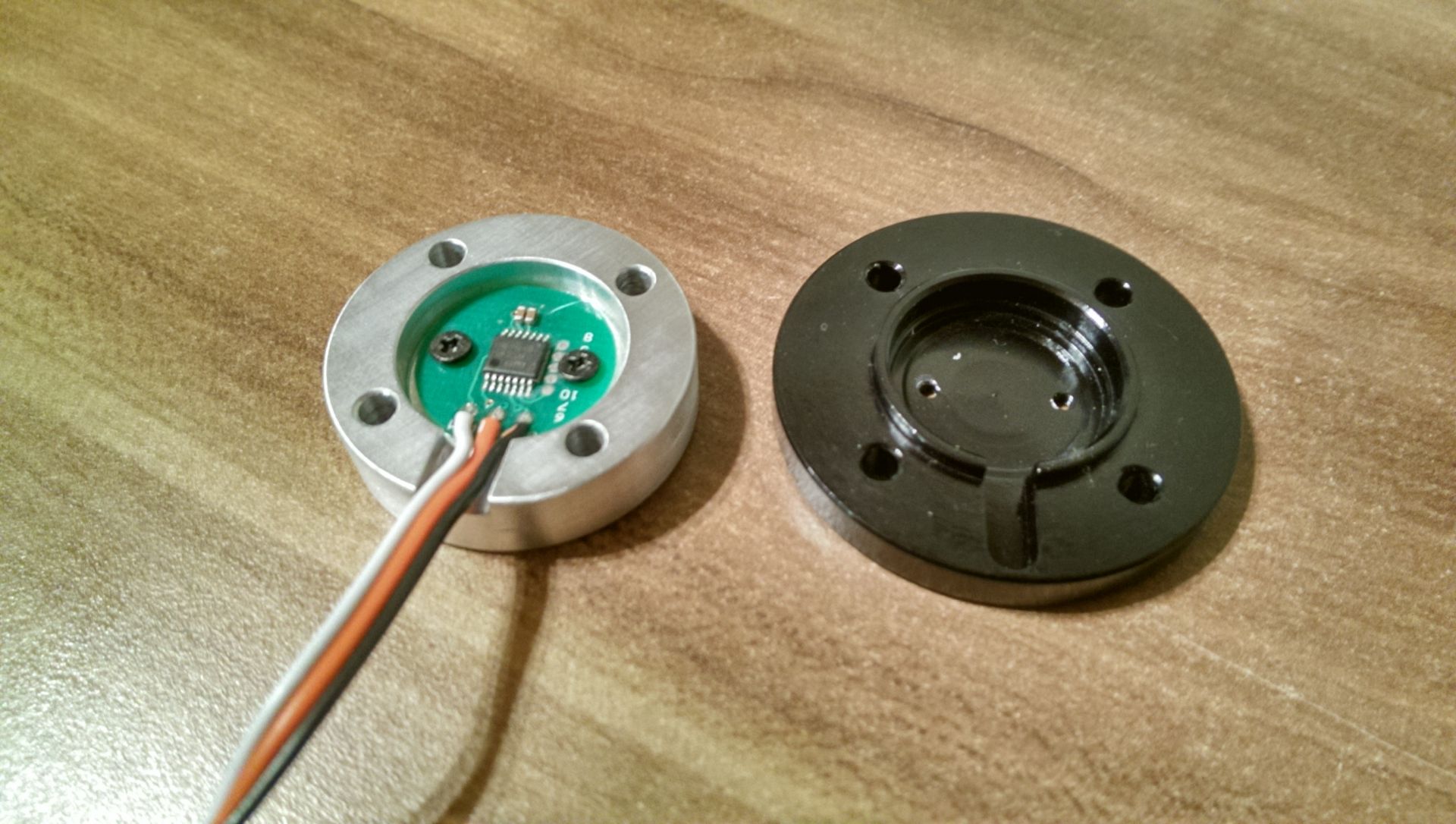
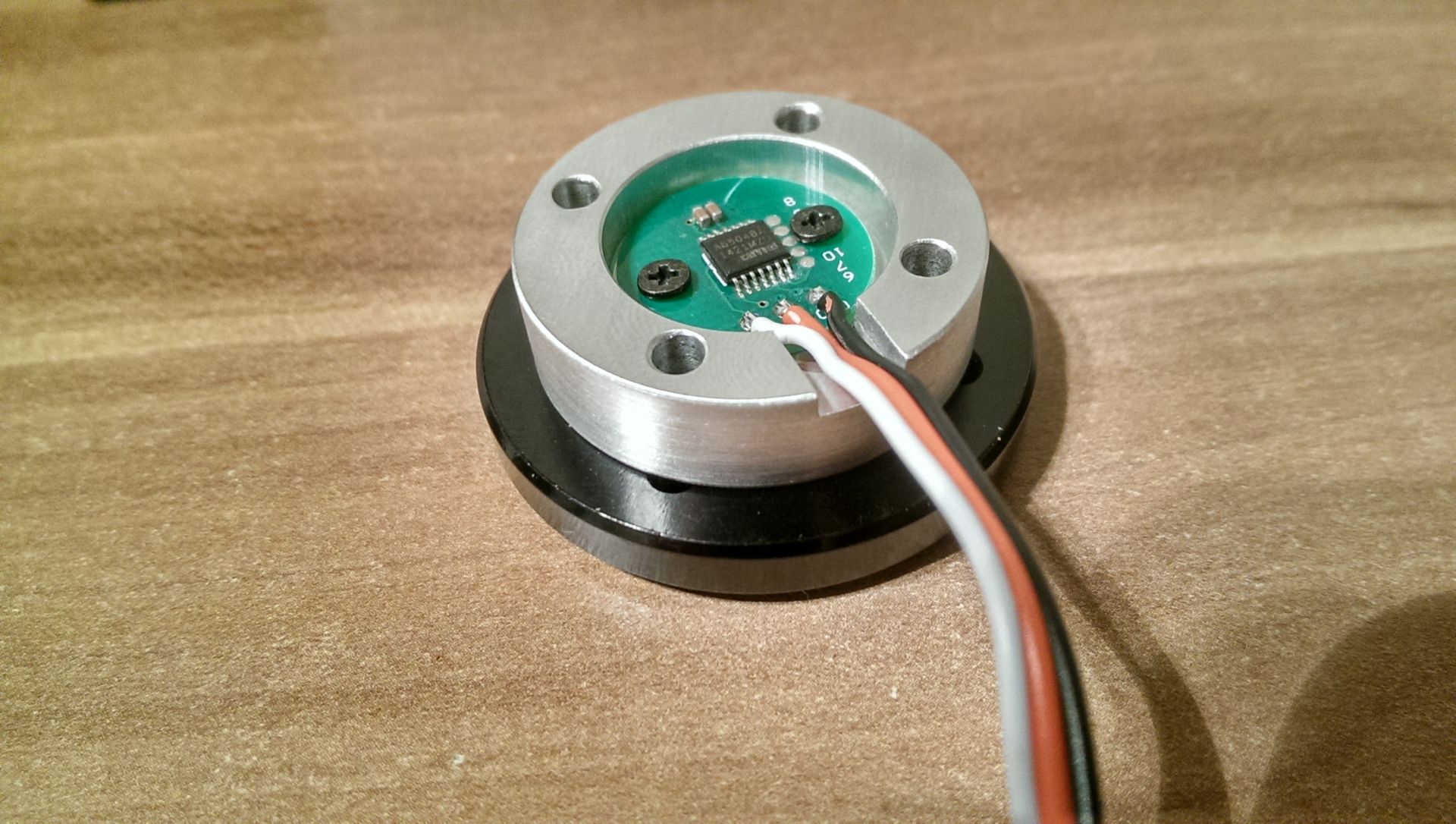
Tehát encoder upgrade:
Vázat szétkaptam, a műtét folyamatban. Az encodereknek csináltam új házat, mert amit adtak hozzá azt nem tudom felhasználni. Átalakítani nem akartam ill. nem is lehetett volna szakszerűen. Ugyan ez a helyzet a mágnes tartójával. Nálam ez egy kis cső-szerűség lesz, ez központosítja majd a mágnest a motor tengelyére. Nem bonyolítom túl, a mágnes ragasztva lesz.
Viszont gondban leszek a mágnes és a szenzor közti hézag beállításával. Adott a mágnes relevencia értéke, illetve a szenzor szükséglete, csak épp egy mérőeszköz hiányzik, hogy megtudjam mekkora távolságra kell pozicionáljam a mágnest.
Számokkal: a szenzor közepétől R1 rádiuszán kell a mágneses mezőnek 30-70mT között lennie. A mágnes pedig 11,8-12,4kGs (1180-1240mT) -gondolom a felületén- sugároz. Ha nől a távolság, drasztikusan csökken a mágneses mező, így a távolsággal lehetne beállítani a szükséges 30-70mT értéket. Ehhez kéne egy Gauss-mérő...


-
A MOZA Light gimbalról ránézésre mi a véleményetek?
Érdekes szerkezetnek tűnik, csak kicsit nehéz,
2kilós. Gondoltam ha vmikor kijön a pana gh5,
tennék egy ilyet alá, addig meg a pici rx100amat
vinné.Egyelőre szempontok:
1. GH4+oly 2.8/40-150-et (1.4kg) simán, profin
kiszolgáljon
2. Alkalmasint drónra is rögzíthető legyen
3. Legyen wifis távvezérlés
4. Jó lenne 2kiló alatti önsúly - esetleg egy 1kiló
körüli sokatbíró karbon varázsszerkezet, én sem
vagyok sherpa.Mindig meglep milyen sokan hiszik el, hogy van ingyen ebéd.
-
.DLL
veterán
válasz
 t72killer
#21
üzenetére
t72killer
#21
üzenetére
A kérdés az, hogy vajon mennyire stabil és mennyire micro-finom. Mennyire bugmentes a vezérlője. Fícsörök alapján amúgy jónak tűnik. azért ilyen nehéz, mert nagy részt szinte csak aluból van, ugyan ez carbon elemekből 1,5kg is lehetne. Egyébként nem vészes a 2kg sem, főleg kis vázzal. Én gimbalom 2,5kg lett
 550D+11-16/2.8, esküvő de. 10-től hajnal 4(!)-ig, nem mondom, hogy nem fáradtam el, de bírtam, és a gépezet is (ezen meg is lepődtem ).
550D+11-16/2.8, esküvő de. 10-től hajnal 4(!)-ig, nem mondom, hogy nem fáradtam el, de bírtam, és a gépezet is (ezen meg is lepődtem ).[ Szerkesztve ]
(P.H.)
-
válasz
t72killer
#24
üzenetére
Lejárt a szerk idő:
Mennyire finom ezeknek a gimbaloknak a mozgása? Kistelénél (300mm ekv) 1 pixel kb 1/1000-ed fok, míg szögtartásra a legtöbb gimbalnál jóval nagyobb 0.02 fok körüli értékeket láttam - ha egyáltalán van ilyen érték megadva. Ez mennyire gond?
Mindig meglep milyen sokan hiszik el, hogy van ingyen ebéd.
-
.DLL
veterán
válasz
t72killer
#25
üzenetére
Ráadásul az a 0,02 fok kb csak az ideálist adja meg, nyilván ha tudna jobbat azt írnák az adatlapra, hogy szebb legyen. Magyarán ennél rosszabbra kell számítani a gyakorlatban, tehát ennek megfelelően kéne viszafejteni, hogy mekkora látószöget (és abból gyutávot) használhatsz maximum.
Egyébként hogy jött ki ez a 0,001° elmozdulás? Full HD-vel (2Mp) számoltál? Ezzel számolva nekem az jött ki, hogy ekv. 300 esetén (kb. 8,15° átlósan) 270 pixel fér bele 1 fokba.
[ Szerkesztve ]
(P.H.)
-
csibész35
tag
válasz
t72killer
#25
üzenetére
Szerintem nagyon nem érdemes ekv 80mm-nél nagyobb üvegekkel használni. Akkora távolságnál már elég követhetetlenné válnak a tárgyak. Szvsz az inkább állványos/slideres történet.
A 0.02 fok az encoderrel szereltekre igaz, az már elég pontos. A simák inkáb 0.2-0.5 fokot tudnak tartani.
Came gimbalokat sokan használnak, elég elterjedt, de szerintem azzal is foglalkozni kell, hogy jól működjön.
-
.DLL
veterán
válasz
csibész35
#28
üzenetére
Gondolod, hogy a legrosszabbat adják meg, és azon belül kell maradnia, tehát csak jobbra számíthat az ember?

Szerintem ez a Moza nem enkóderes (se a Cáme-háme TV), ilyet nem sok gyáriban láttam eddig (Mövi, DJI...), magyarán a megadott 0,02° csak szépítés és a valós teljesítményre egy tizedesvesszővel arrébb lehet számítani out of the box.[ Szerkesztve ]
(P.H.)
-
Ja, jogos, a fizikai 3-4mikronos pixelmérettel (fotó...) számoltam. Amúgy 4k a cél (máris ebben nyomom a kis rx100-zal).
Azért a nagy kérdezősködés, mert felmerült német használtpiacon 1k€ alatt egy komplett, újszerű came-tv 7800 ami elsőre nagyon szimpi (az önsúlyát leszámítva), de elég kényes vagyok a felhasználást nézve.
Mindig meglep milyen sokan hiszik el, hogy van ingyen ebéd.
-
-
Drónokhoz tervezett gimbalt mennyire lehet kézben használni? (vágok neki egy husángot, ha csak a felfüggesztés hiányzik...) lényegesen olcsóbb tud lenni
Mindig meglep milyen sokan hiszik el, hogy van ingyen ebéd.
-
.DLL
veterán
válasz
t72killer
#34
üzenetére
Ez nem brushless motorokkal van meghajtva, hanem áttételes szervókkal, lassabb reakció, kvésbé "smooth" mozgás. De igen, van ennyiért kézi brushless gimbal is: RC Timer - Legacy

Más:
DJI Osmo bemutató a Próhardveren. Azért a tesztvideók lehettek volna jobbak, a felében csak állt a csávó, na mindegy neten van számtalan videó még. Jópofa cucc de kissé gépies a mozgása, és mivel viszonylag könnyű a lépések fel-le mozgása is jobban látszik.Ezt még - a sztedizés közbeni más lépéstechnikát - nekem is gyakorolnom kell, különben hullámvasút a videó...
[ Szerkesztve ]
(P.H.)
-
válasz
csibész35
#38
üzenetére
Sztem motoros, komplett megoldást veszek, most épp a copterframes cuccait nézegetem, de sztem még pár hónapot biztos agyalok a dolgon.
Mindig meglep milyen sokan hiszik el, hogy van ingyen ebéd.
-
csibész35
tag
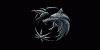
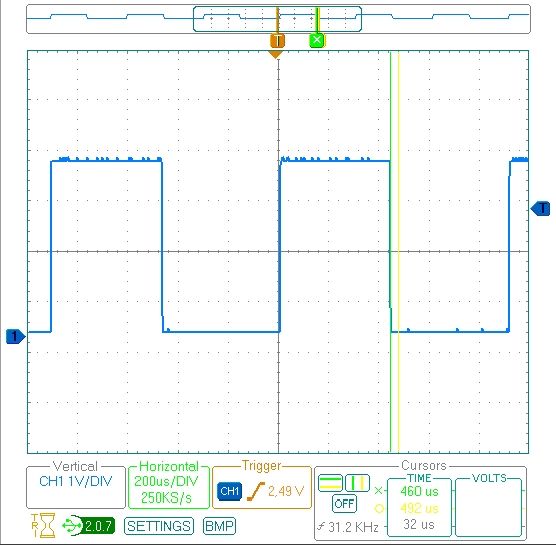
Felcsillant a fény az alagút végén! Oszcilloszkópos mérésnek hála meglett a jel és már a GUI is látta az encodereket.
Mivel nem a gyári mágneseket használtam (így egyszerűbb volt), hanem 1mm-el kisebb átmérőjűt, pont úgy sikerült felszerelni, hogy valamiféle holttérbe kerültek (???) és nem kommunikáltak.
Kicsit megfeszítve az encodert tartó házat már volt jel, de gyanúsan keveset változott. Kipróbáltam a gyári mágnessel is és jelentős a külömbség.Ez a külön vásárolt mágnes (Ø5mm), 90° elfordulással 32µs-os tartományban mozgott
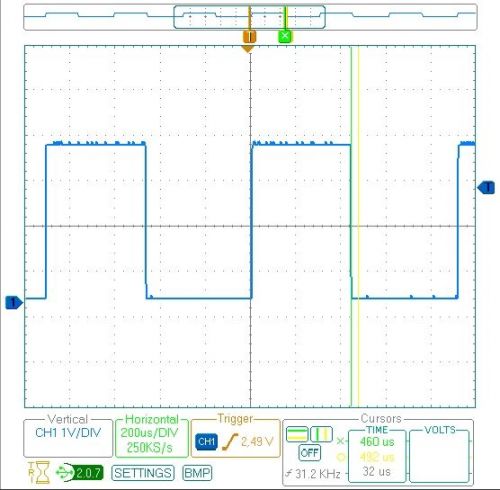
Ez pedig a gyári mágnes (Ø6mm), 90° elfordulással 232µs-os tartományban mozgott
Elviekben, új mágnestartók faragása után már rakhatom is össze a gépet. Megint.
-
csibész35
tag
Gyakorlatilag nem is a pozicionálással volt a baj, hanem az 5mm-es mágnes már nem fedte le a chip sarkait.
Épp most próbáltam az új tartókkal ill a gyári mágnessel és tökéééletes!
Van egybeépített zárt gyári cucc. Olyan 150-200$. Darabja![;]](//cdn.rios.hu/dl/s/v1.gif) Egyébként ezért az utólagos szettért (a 3 tengelyre) is elkérnek 200 dodót, úgyhogy jók vagyunk
Egyébként ezért az utólagos szettért (a 3 tengelyre) is elkérnek 200 dodót, úgyhogy jók vagyunk [ Szerkesztve ]
-
.DLL
veterán
válasz
csibész35
#42
üzenetére
Ha tökéletes, az a lényeg.
 Magyarán nem háklis nagyon a pozícióra, csak legyen elég nagy felületű a másgnes.
Magyarán nem háklis nagyon a pozícióra, csak legyen elég nagy felületű a másgnes.
Jöhetne majd egy-egy olyan videó, hogy kikapcsolt enkóderekkel, majd bekapcsolva, kb. ugyan azt a "jelentet" felvenni. A futás a legproblémásabb rész mindig a gimbaloknál (meg általában a sztedikemeknél is).(P.H.)
-
#45
 industrial
tag
industrial
tag
industrial
tag
Esetleg valakinek valami tippje?
[Gimbal Error] -
#46
.DLL
veterán
industrial
#45
.DLL
veterán
válasz
 industrial
#45
üzenetére
industrial
#45
üzenetére
Ez lehet elég sok minden, egyrészt nincs rajta teher, legalább a mini kamerát tedd rá, mert így nem lehet PID-et állítani, és túlreagálhatja magát. Szóval leht a PID és más szoftveres beállítás is rossz, pl. motor irány fordítva, szenzor tengelyek fordítva, érzékelő kábel jitteres (bár akkor jelzi az I2C hibát a szoftver), stb.
[ Szerkesztve ]
(P.H.)
-
#48
csibész35
tag
industrial
#47
csibész35
tag
válasz
industrial
#47
üzenetére
Szia! Ahogy .DLL is írta, tényleg sok minden lehet. Én inkább a tengelyek nem megfelelő irányára (esetleg felcserélt vezetékek) tippelnék, ott nem jelez hibát. A hiba előtt működött amúgy?
PID beállításról egy (szerintem) elég jó videó
-
csibész35
tag
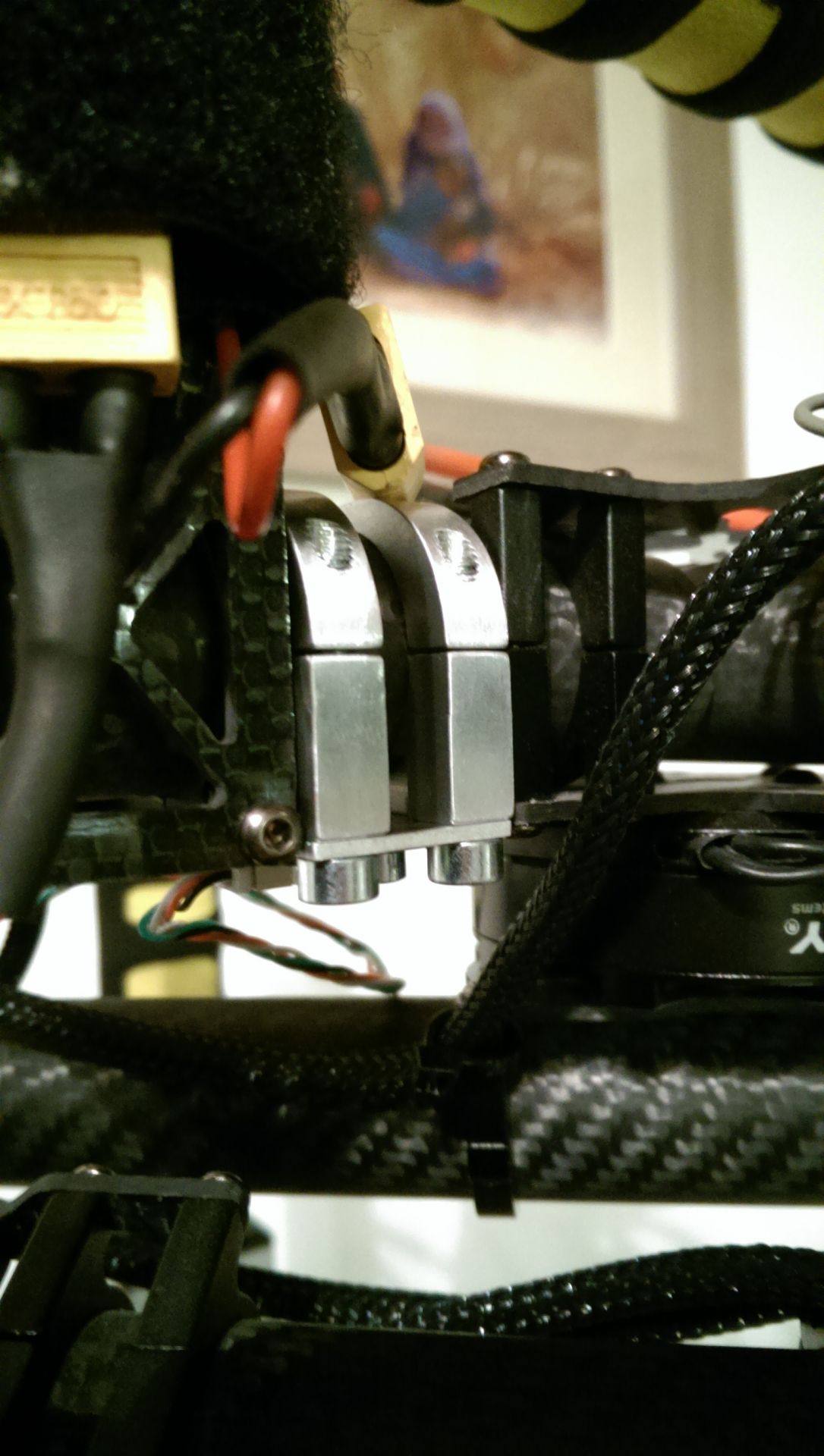
Elkészült az encoder upgrade, kicsit még kell simogatni, de jónak tűnik! A folyamatról készült egy rövid összeállítás is. Teszt videók hamarosan!
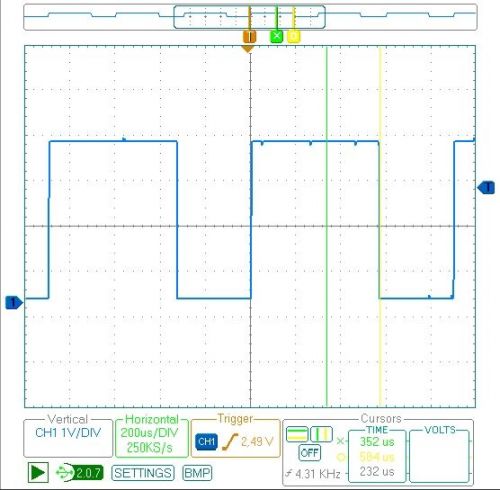
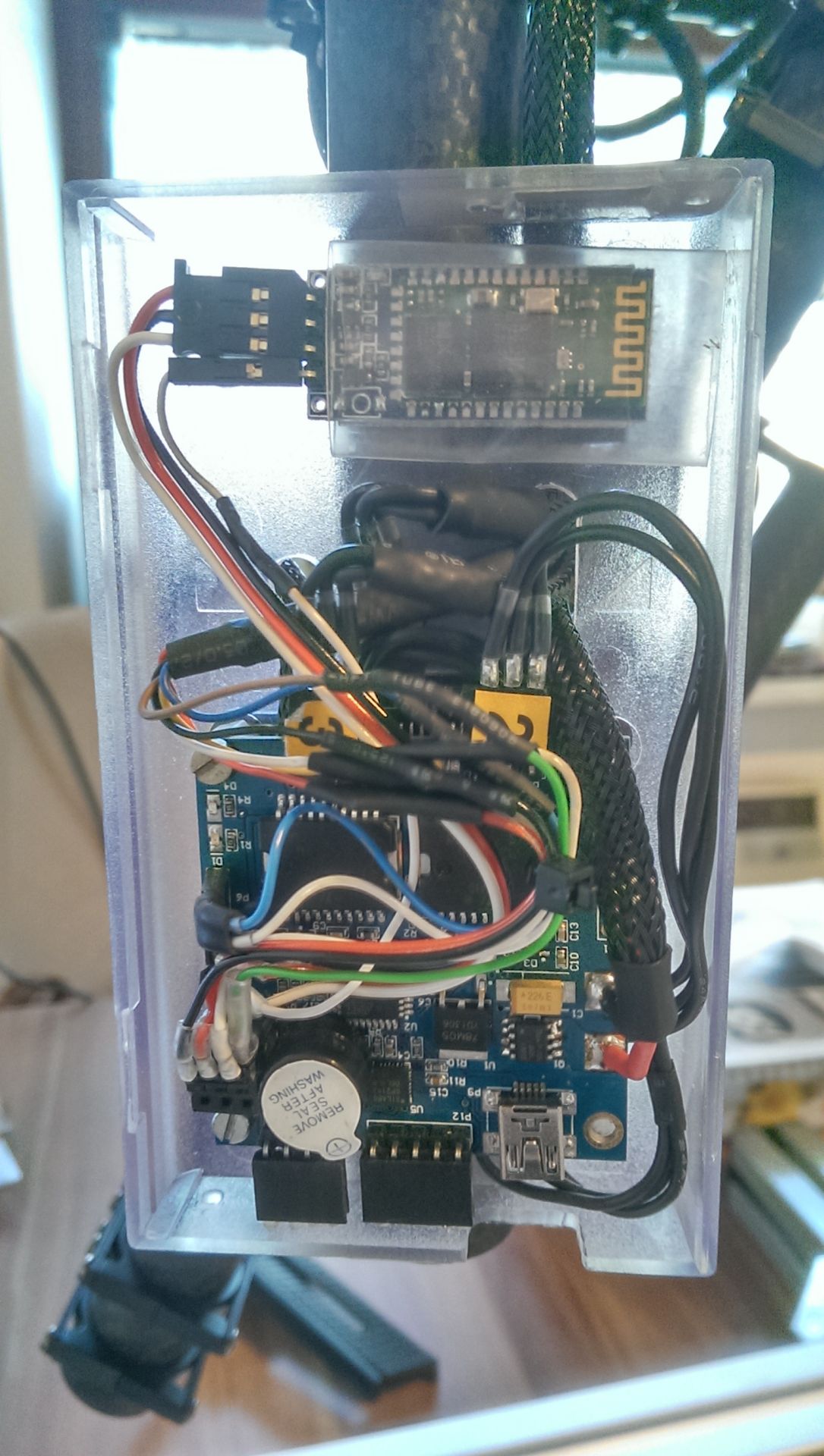
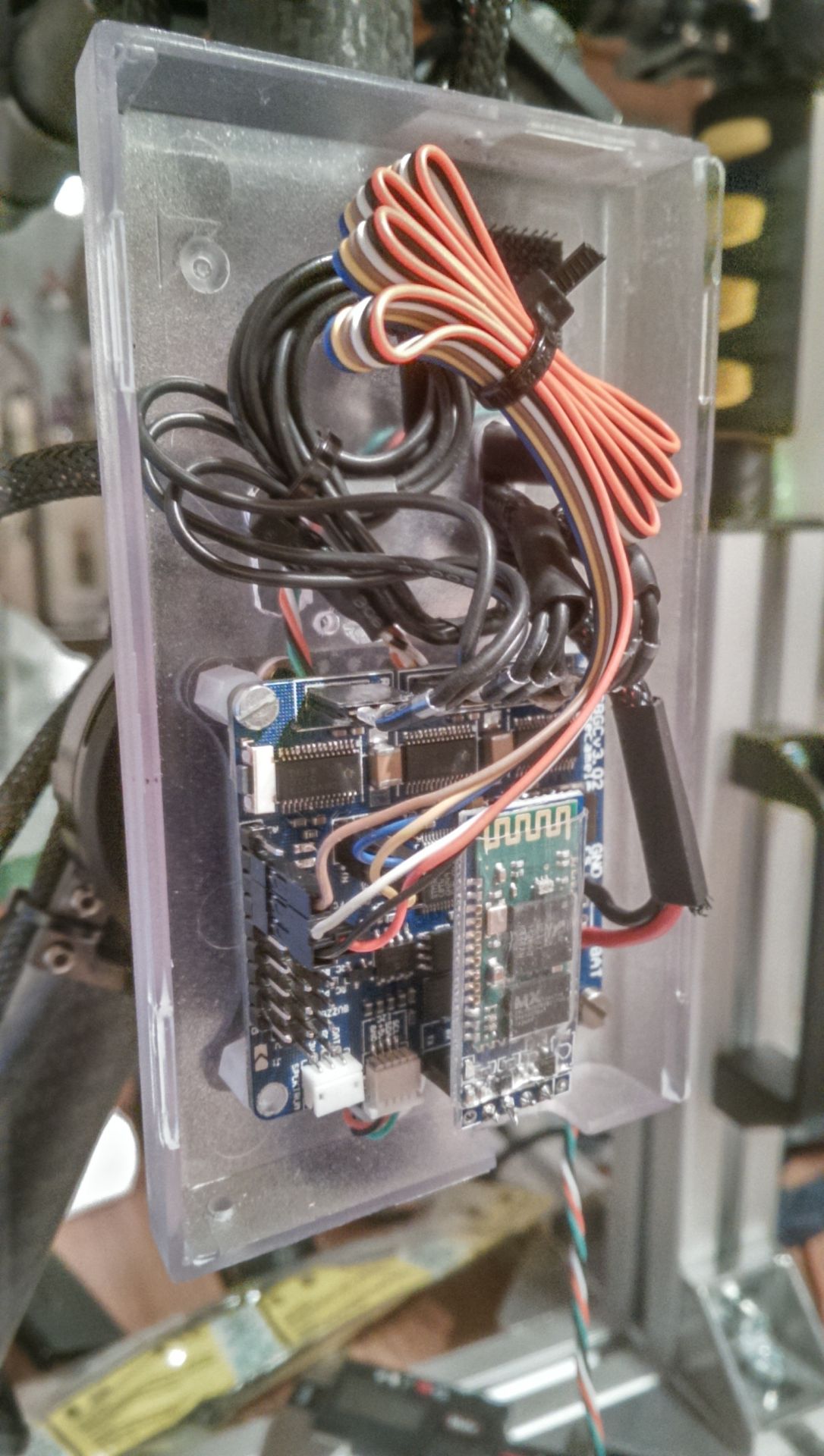
Röviden: AS5048A encoderek egyedi házzal és mágnestartókkal + gui upgrade; új vezetékelés (amennyire tudtam elvezettem a csövekben); új vezérlő ház, új feszmérővel és kapcsolóval; új markolattartó konzol; bőrözött markolatok; némi festés; új 4S LiPo akksi






 olyan 5-10kg-ra saccolnám kamera nélkül. Viszont van rajta fókusz állító! Nagy segítség!
olyan 5-10kg-ra saccolnám kamera nélkül. Viszont van rajta fókusz állító! Nagy segítség!



















 550D+11-16/2.8, esküvő de. 10-től hajnal 4(!)-ig, nem mondom, hogy nem fáradtam el, de bírtam, és a gépezet is (ezen meg is lepődtem
550D+11-16/2.8, esküvő de. 10-től hajnal 4(!)-ig, nem mondom, hogy nem fáradtam el, de bírtam, és a gépezet is (ezen meg is lepődtem 



![;]](http://cdn.rios.hu/dl/s/v1.gif) Egyébként ezért az utólagos szettért (a 3 tengelyre) is elkérnek 200 dodót, úgyhogy jók vagyunk
Egyébként ezért az utólagos szettért (a 3 tengelyre) is elkérnek 200 dodót, úgyhogy jók vagyunk  Magyarán nem háklis nagyon a pozícióra, csak legyen elég nagy felületű a másgnes.
Magyarán nem háklis nagyon a pozícióra, csak legyen elég nagy felületű a másgnes.


Új hozzászólás Aktív témák
- Formula-1
- Kínai, és egyéb olcsó órák topikja
- Elektromos (hálózati és akkus) kéziszerszámok, tapasztalatok/vásárlás
- Star Trek Online -=MMORPG=-
- AMD K6-III, és minden ami RETRO - Oldschool tuning
- Volkswagen ID.7 menetpróba
- E-roller topik
- Számtech boltosok memoárjai, azaz amikor kiborulunk...
- Nothing Phone (2) - több, mint elsőre látszik
- Milyen SSD-t vegyek?
- További aktív témák...
